
Software-definierte Fahrzeuge: Sensorfusion und E/E-Architektur erklärt
über
Moderne Fahrzeugelektronik entwickelt sich von isolierten, einzeln funktionierenden Steuergeräten hin zu softwaredefinierten Fahrzeugarchitekturen, die Sensordaten im gesamten Fahrzeug austauschen. Dieser Wandel wird durch das Volumen und die Komplexität der Daten von Kameras, Radar und LiDAR angetrieben, ebenso wie durch die Notwendigkeit einer zuverlässigen Wahrnehmung in ADAS und autonomen Fahrfunktionen. Das folgende Video erklärt, wie Sensorfusion in der Praxis funktioniert und wie sich E/E-Architekturen weiterentwickeln, um diese neuen Anforderungen zu erfüllen.
Video. Softwaredefinierte Fahrzeuge mit Sensorfusion und EE-Architektur
Von Einzelfunktions-Steuergeräten zu zentraler Datenverarbeitung
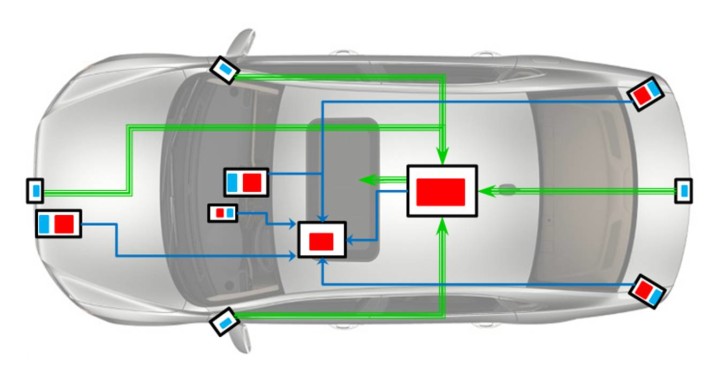
Frühere Systeme nutzten einzelne Steuergeräte für spezifische Funktionen, die jeweils mit einem kleinen Sensor verbunden waren und nur wenige Daten lieferten. Moderne Fahrzeuge verwenden hochauflösende Sensoren, die mehrere Systeme gleichzeitig versorgen müssen. Dies erfordert eine höhere Bandbreite und flexiblere Kommunikationsnetzwerke.
Was den Bedarf an Sensorfusion antreibt
Jeder Sensortyp hat Stärken und Schwächen. Radar liefert präzise Entfernungsdaten, aber eine schlechte Winkelauflösung. Kameras bieten detaillierte visuelle Informationen, aber eine schwächere Tiefeninformation. LiDAR sorgt für geometrische Präzision, allerdings bei größerem Datenvolumen. Fusionsalgorithmen kombinieren diese Stärken, um die Erkennungsgenauigkeit zu verbessern, Rauschen zu verringern und Fehlalarme zu vermeiden.
Platzierung der Rechenleistung
Ein Teil der Vorverarbeitung findet bereits in den Sensoren selbst statt, aber mit steigendem Automatisierungsgrad wandern immer mehr Rechenoperationen auf Domänencontroller oder zentrale Hochleistungsrechner. Wo die Fusion stattfindet, variiert je nach Design und hängt vom Datenvolumen, der Rechenlast und den Systemzeiten ab.
Datenausgabe und -darstellung
Sensorfusions-Software kann je nach Bedarf der Fahrfunktion entweder Objektlisten oder niedrigere Raster-/Zellendarstellungen erzeugen. Höhere Automatisierungsstufen erfordern in der Regel detailliertere, niedrigere Darstellungen, die mehr Umgebungsinformationen bewahren.
Sicherheit und Software-Absicherung
Da diese Systeme die Fahrzeugsteuerung beeinflussen, erfolgt die Entwicklung nach automobilen Sicherheitsstandards wie ISO 26262. Die Tests erfolgen sowohl mit Simulation als auch mit realen Fahrdaten, um Randfälle aufzudecken, die künstlich nicht zuverlässig erzeugt werden können.
Warum das wichtig ist
Softwaredefinierte Architekturen ermöglichen eine hochwertigere Wahrnehmung mit weniger redundanten Sensoren und erlauben die Weiterentwicklung von Funktionen durch Software-Updates. Diese Flexibilität ist zentral für die laufende Entwicklung von ADAS- und autonomen Systemen.

Diskussion (0 Kommentare)