
Review: Walabot Creator, ein außergewöhnlicher 3D-Sensor
13. September 2018
über
über
 Walabot Creator ist ein 3D-Sensor, der mit hochfrequenten Funkwellen ein „3D-Bild“ dessen erstellt, was sich bis zu sechs Meter vor ihm befindet. Und davon lässt er sich auch nicht so einfach von Mauern oder anderen Hindernissen abhalten. Aber das ist noch nicht alles: Die Entwickler haben es geschafft, andere Funktionen wie einen Atemmonitor und eine Tracking-Funktion zu integrieren.
Walabot Creator ist ein 3D-Sensor, der mit hochfrequenten Funkwellen ein „3D-Bild“ dessen erstellt, was sich bis zu sechs Meter vor ihm befindet. Und davon lässt er sich auch nicht so einfach von Mauern oder anderen Hindernissen abhalten. Aber das ist noch nicht alles: Die Entwickler haben es geschafft, andere Funktionen wie einen Atemmonitor und eine Tracking-Funktion zu integrieren.
Auspacken und anschließen
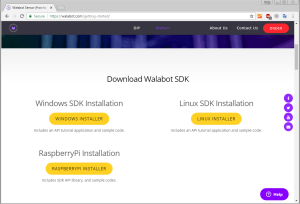 Der Walabot-Creator liegt vor uns. In der Verpackung finden wir ein knapp gehaltenes Infoblatt mit Get-Started-Anleitungen und den Walabot Creator selbst. Das Infoblatt verweist auf die Website https://walabot.com/gettingstarted, wo Sie ein Walabot-API-Tutorial finden und von der Sie das Software Development Kit (SDK) kostenlos herunterladen können. Das SDK ist für Windows, Linux und den Raspberry Pi verfügbar (als .deb-Datei). Es gibt zwar auch eine Android-App namens „Walabot DIY“, die aber leider nur mit dem Walabot DIY und nicht mit Starter, Creator oder Developer zusammenarbeitet.
Der Walabot-Creator liegt vor uns. In der Verpackung finden wir ein knapp gehaltenes Infoblatt mit Get-Started-Anleitungen und den Walabot Creator selbst. Das Infoblatt verweist auf die Website https://walabot.com/gettingstarted, wo Sie ein Walabot-API-Tutorial finden und von der Sie das Software Development Kit (SDK) kostenlos herunterladen können. Das SDK ist für Windows, Linux und den Raspberry Pi verfügbar (als .deb-Datei). Es gibt zwar auch eine Android-App namens „Walabot DIY“, die aber leider nur mit dem Walabot DIY und nicht mit Starter, Creator oder Developer zusammenarbeitet.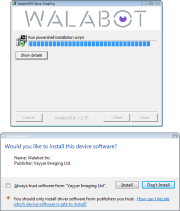 Wir haben die Windows-Version auf einem 64-Bit-System mit Windows 7 Professional installiert und ausprobiert. Während der Installation fragt Windows, ob der Treiber für den Walabot vertrauenswürdig ist, was Sie natürlich mit Ja beantworten müssen. Der erste Versuch, die Software auf einem Windows-10-Rechner zu installieren, schien zunächst gut zu verlaufen, aber leider wurde der Walabot beim Anschließen dann nicht erkannt. Glücklicherweise gibt es auch eine „Windows 10 SDK beta“, die prima funktioniert hat.
Wir haben die Windows-Version auf einem 64-Bit-System mit Windows 7 Professional installiert und ausprobiert. Während der Installation fragt Windows, ob der Treiber für den Walabot vertrauenswürdig ist, was Sie natürlich mit Ja beantworten müssen. Der erste Versuch, die Software auf einem Windows-10-Rechner zu installieren, schien zunächst gut zu verlaufen, aber leider wurde der Walabot beim Anschließen dann nicht erkannt. Glücklicherweise gibt es auch eine „Windows 10 SDK beta“, die prima funktioniert hat.Nach der Installation kann die Walabot-Applikation über den Link „WalabotAPItutorial“ gestartet werden, den das Installationsprogramm im Startmenü angelegt hat. Das Programm startet zunächst das Tutorial zum Anschluss der Hardware in vier Schritten. Dann können Sie über die Tabs oben im Fenster zwischen den verschiedenen Optionen des SDKs wechseln.

Wie sieht die Software aus?
 Die zweite Registerkarte des Programms „Sensor – Target Detection“ ist eigentlich der interessanteste Teil, denn hier werden die verschiedenen Parameter eingestellt und Ihnen ein visuelles Feedback von dem gegeben, was der Sensor „sieht“. Was die Einstellungen betrifft, können die folgenden Parameter angepasst werden:
Die zweite Registerkarte des Programms „Sensor – Target Detection“ ist eigentlich der interessanteste Teil, denn hier werden die verschiedenen Parameter eingestellt und Ihnen ein visuelles Feedback von dem gegeben, was der Sensor „sieht“. Was die Einstellungen betrifft, können die folgenden Parameter angepasst werden:- R stellt den Sensorbereich zwischen 1 und 1000 cm* ein.
- Theta stellt den horizontalen Winkel des Sensorbereichs von 0 bis 90 Grad ein**.
- Phi stellt den vertikalen Winkel des Sensorbereichs von 1 bis 90 Grad ein**.
- In der Spalte Resolution stellen Sie die Auflösung der drei vorherigen Parameter ein.
- Mit der Einstellung Threshold können Sie schwache Signale herausfiltern.
- Wenn Sie den Moving Target Indicator aktivieren, zeigt die Software nur sich bewegende Objekte an; Objekte, die sich zuerst bewegen und dann stillstehen, werden langsam herausgefiltert.
- Mit der Anzahl der Targets geben Sie an, wie viele bewegte Objekte die Software erwarten kann und in den Detektorfeldern maximal angezeigt werden.
** Walabot 'stehend' mit nach unten ausgerichtetem USB-Anschluss.
Außerdem gibt es die zwei Schaltflächen Apply & Calibrate und Sensor Tutorial, deren Bezeichnungen für sich sprechen. Um geänderte Parameter anzuwenden, klicken Sie auf die Apply & Calibrate. Dadurch wird auch der Sensor kalibriert. Beim Kalibrieren ist es wichtig, dass sich keine beweglichen Objekte vor dem Sensor befinden, da dies den Kalibriervorgang stören und zu Fehlmessungen führen würde.
Arena
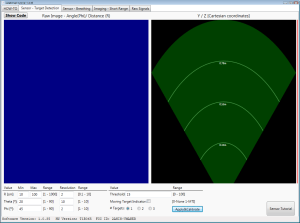
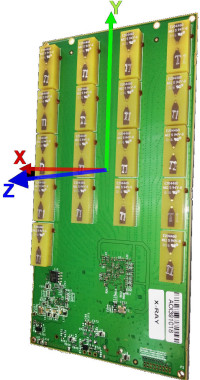 Die beiden großen Fenster zeigen, was die Antennen des Walabot auffangen. Der Bereich, den der Sensor abtastet, wird als „Arena“ bezeichnet. Die beiden Fenster sind visuelle Interpretationen dieser Arena und zeigen den y- und z-Messbereich, in dem der Sensor am empfindlichsten ist. Die sinnvollste Ausrichtung des Sensors ist daher horizontal, mit dem USB-Anschluss rechts, wenn man auf das Antennenarray des Walabots blickt. Dann entspricht eine Bewegung eines erfassten Objekts nach links dem, was Sie auf dem Bildschirm geschehen sehen.
Die beiden großen Fenster zeigen, was die Antennen des Walabot auffangen. Der Bereich, den der Sensor abtastet, wird als „Arena“ bezeichnet. Die beiden Fenster sind visuelle Interpretationen dieser Arena und zeigen den y- und z-Messbereich, in dem der Sensor am empfindlichsten ist. Die sinnvollste Ausrichtung des Sensors ist daher horizontal, mit dem USB-Anschluss rechts, wenn man auf das Antennenarray des Walabots blickt. Dann entspricht eine Bewegung eines erfassten Objekts nach links dem, was Sie auf dem Bildschirm geschehen sehen.Das linke Fenster zeigt die Intensität der gemessenen Signale (Reflexionen): hellblau für die niedrigste und rot für die höchste Intensität. Die Position in dem Fenster entspricht der Position des Objekts in der Arena.
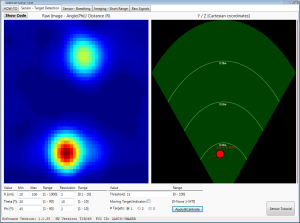 Das rechte Fenster zeigt eine kartesische Darstellung der yz-Ebene (eigentlich die xz-Ebene, wenn der Sensor horizontal positioniert ist, wie wir oben vorgeschlagen haben). Der eingestellte Öffnungswinkel phi beschränkt den Blickwinkel des Sensors und verleiht der Arena die Form eines umgedrehten Kegels. Es ist übrigens nicht jede Kombination von Öffnungswinkel phi und theta möglich. Die Software gibt dann eine Fehlermeldung aus. In dieser Kegelgrafik zeigt die Software (bis zu drei) Objekte, die der Sensor erkennt, in Form eines roten Punkts mit numerischen Daten. Rechts ist also einfach eine gefilterte Version des linken Fensters zu sehen, ergänzt durch genaue Zahlen.
Das rechte Fenster zeigt eine kartesische Darstellung der yz-Ebene (eigentlich die xz-Ebene, wenn der Sensor horizontal positioniert ist, wie wir oben vorgeschlagen haben). Der eingestellte Öffnungswinkel phi beschränkt den Blickwinkel des Sensors und verleiht der Arena die Form eines umgedrehten Kegels. Es ist übrigens nicht jede Kombination von Öffnungswinkel phi und theta möglich. Die Software gibt dann eine Fehlermeldung aus. In dieser Kegelgrafik zeigt die Software (bis zu drei) Objekte, die der Sensor erkennt, in Form eines roten Punkts mit numerischen Daten. Rechts ist also einfach eine gefilterte Version des linken Fensters zu sehen, ergänzt durch genaue Zahlen.


Mehr anzeigen
Weniger anzeigen
Diskussion (0 Kommentare)