
5 € (für Mitglieder GRATIS)
LiDAR-Präzisionsmetermaß: misst bis zu zwölf Meter
3. September 2025
über
über
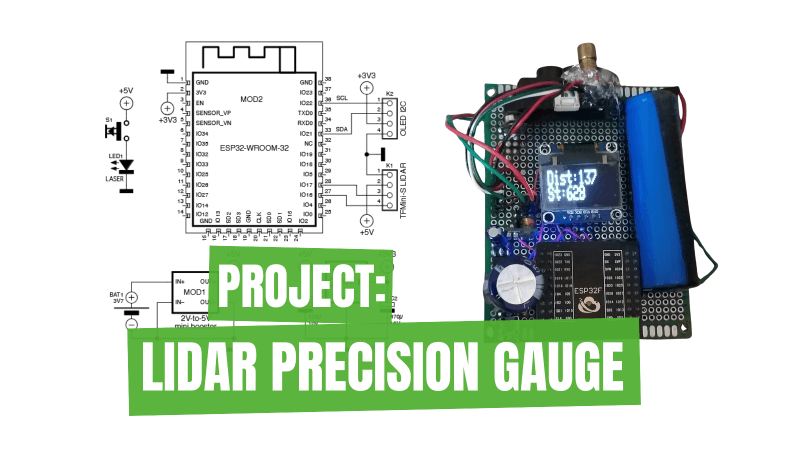
LiDAR-Module sind großartig zum Erkennen von Hindernissen und zum Messen von Entfernungen. Hier verwenden wir ein LiDAR-Modul, um präzise Entfernungsmessungen bis zu 12 m mit einer Auflösung von 1 cm vorzunehmen. Ursprünglich habe ich ein Benewake-LiDAR mit der Bezeichnung TFMini-S gekauft, um damit eine Art Radar zu bauen. Aber wie so oft wurde aus den Plänen nichts, bis ich bei meiner Arbeit eine aufschlussreiche Erfahrung machte und ich das Modul anderweitig nutzen konnte.
Elektrisch widerstandsgeschweißte Rohre (ERW) sind lange Rohre mit einem Durchmesser von 300 mm oder mehr und einer Länge von bis zu zwölf Metern. Sie werden in unserem Kraftwerk für den Transport von Ascheschlamm verwendet. Eines Tages, als ich mit diesen langen Rohren für die Montage der Ascheabzugsleitungen hantierte, stellte ich fest, dass mein Team jedes einzelne Rohr genau vermessen musste, bevor es durch das Ausgangstor herausgeschafft wurde. Jeden Tag musste sich jemand mindestens 30...50 Mal die Ze...


