
Online-Artikel: BalBot - ein selbstbalancierender Roboter
24. April 2020
über
über
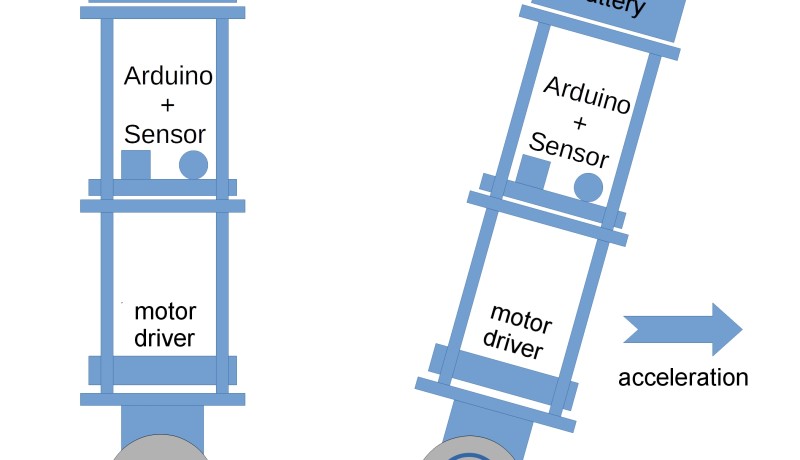
Der Bau von selbstbalancierenden Robotern kann als Vorstufe von humanoiden Maschinen dienen, da die Bewegung auf zwei parallelen Rädern eine Steuerung ähnlich der des aufrecht gehenden Androiden erfordert. In diesem Projekt werden ein Arduino Uno und ein IC, bestehend aus einem Beschleunigungssensor und einem Gyroskop, eingesetzt.
Der Artikel ist zur direkten Darstellung in Ihrem Webbrowser freigegeben.
Der Artikel ist zur direkten Darstellung in Ihrem Webbrowser freigegeben.
Mehr anzeigen
Weniger anzeigen
Diskussion (0 Kommentare)