
Der Tanz des Tausendfüßlers
27. Juli 2016
über
über
Zum Beobachten der oft kunstvoll und präzise ausgeführten Bewegungen von Insekten und anderen Quälgeistern bietet sich der Sommer geradezu an. Nehmen wir zum Beispiel den Tausendfüßler, der sich oft unter Steinen verbirgt und sich eilig davon macht, wenn man diese hoch hebt. Er bewegt sich oft so schnell, dass man gar nicht mehr verfolgen kann, ob dies mit der hohen Zahl seiner Beine zusammen hängt. Auffällig ist die schlängelnde, wellenartige Bewegung seines Körpers, deren Erforschung noch nicht ganz abgeschlossen ist.
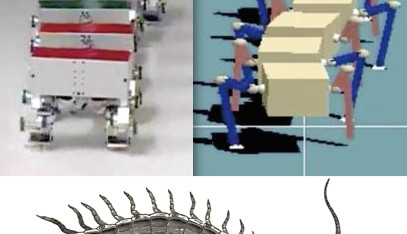
Mit der Simulation eines Tausendfüßlers haben Forscher der Universität Kyoto überraschenderweise festgestellt, dass das Geheimnis der Bewegung dieser Tiere in der Beherrschung der Unstabilität besteht. Was kompliziert klingt, besagt ganz einfach, dass ein Tausendfüßler in einer Art Wellenbewegung seiner zahlreichen Segmente, die sowohl Beschleunigungs- als auch Verzögerungskräfte erzeugen, von einem Ort zum anderen gelangt – ein Phänomen, das auch unter dem Fachbegriff „Shimmy“ (Lenkflattern) bei Zweirädern bekannt ist. Da sich der Körper dieser Insekten sehr dicht am Boden befindet, ist die Bewegungs- und Manövrierfähigkeit der Beine natürlich stark eingeschränkt. Um diese Beschränkung zu überwinden, führt das Tier mit den Gliedern seines Körpers eine wellenartige Bewegung und damit auch eine Fortbewegung aus, die von einem Zustand der Unstabilität beherrscht wird. Das mathematische Modell dieses biologischen Mechanismus, bei dem Bewegungen aus der Instabilität heraus entstehen, wird auch als „Superkritische Hopf-Bifurkation“ bezeichnet. Dank dieses Modells waren die Forscher in der Lage, die Wellenbewegung von Insekten wie zum Beispiel Tausendfüßlern, zu simulieren – und zwar mit Robotern, die eine hohe Zahl von Füßen besitzen, die sich wiederum an einzelnen Segmenten befinden.
Die Erforschung der Bewegungen von Menschen und Tieren spielt eine wichtige Rolle für die Entwicklung der Robotik. Diese Studie wirft ein völlig neues Licht auf die noch im Dunkeln liegenden Bereiche der Motorik von Tieren. Sie übersteigt dabei den engen Rahmen der Biologie, denn ein besseres Verständnis der Materie erlaubt es, für jeden speziellen Roboter die optimale Anzahl von Gliedern und Beinen zu konzipieren.
Mit der Simulation eines Tausendfüßlers haben Forscher der Universität Kyoto überraschenderweise festgestellt, dass das Geheimnis der Bewegung dieser Tiere in der Beherrschung der Unstabilität besteht. Was kompliziert klingt, besagt ganz einfach, dass ein Tausendfüßler in einer Art Wellenbewegung seiner zahlreichen Segmente, die sowohl Beschleunigungs- als auch Verzögerungskräfte erzeugen, von einem Ort zum anderen gelangt – ein Phänomen, das auch unter dem Fachbegriff „Shimmy“ (Lenkflattern) bei Zweirädern bekannt ist. Da sich der Körper dieser Insekten sehr dicht am Boden befindet, ist die Bewegungs- und Manövrierfähigkeit der Beine natürlich stark eingeschränkt. Um diese Beschränkung zu überwinden, führt das Tier mit den Gliedern seines Körpers eine wellenartige Bewegung und damit auch eine Fortbewegung aus, die von einem Zustand der Unstabilität beherrscht wird. Das mathematische Modell dieses biologischen Mechanismus, bei dem Bewegungen aus der Instabilität heraus entstehen, wird auch als „Superkritische Hopf-Bifurkation“ bezeichnet. Dank dieses Modells waren die Forscher in der Lage, die Wellenbewegung von Insekten wie zum Beispiel Tausendfüßlern, zu simulieren – und zwar mit Robotern, die eine hohe Zahl von Füßen besitzen, die sich wiederum an einzelnen Segmenten befinden.
Die Erforschung der Bewegungen von Menschen und Tieren spielt eine wichtige Rolle für die Entwicklung der Robotik. Diese Studie wirft ein völlig neues Licht auf die noch im Dunkeln liegenden Bereiche der Motorik von Tieren. Sie übersteigt dabei den engen Rahmen der Biologie, denn ein besseres Verständnis der Materie erlaubt es, für jeden speziellen Roboter die optimale Anzahl von Gliedern und Beinen zu konzipieren.
Mehr anzeigen
Weniger anzeigen
Diskussion (0 Kommentare)