Buch: Motor Control – Projects with Arduino & Raspberry Pi Zero W
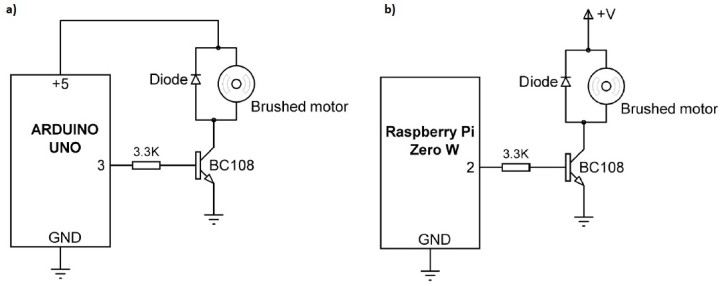
Projekt 1 ist für einen bürstenbehafteten Gleichstrommotor gedacht, der mit 3 bis 6 V betrieben werden kann und über einen Transistortreiber mit einem Mikrocontroller verbunden ist. Der Motor wird für 10 Sekunden eingeschaltet und für 5 Sekunden ausgeschaltet, und dies wird solange wiederholt, bis Sie das stoppen. Die zahlreichen folgenden Projekte sind etwas komplizierter, aber Ibrahim bemüht sich, die technischen Details so einfach wie möglich zu halten. Bei der Pulsweitenmodulation (PWM) zum Beispiel erläutert er das Tastverhältnis der PWM-Signale und verwendet einfache Gleichungen, um die Grundkonzepte zu erklären.
Die Schaltpläne von Projekt 1 mit (a) Arduino Uno und (b) Raspberry Pi Zero W.
Nachdem sich Kapitel 2 um einfache DC-Motorprojekte dreht, behandelt Ibrahim in Kapitel 3 einfache Schrittmotorprojekte und in Kapitel 4 dann Projekte mit Servos. Eines seiner interessanteren Projekte ist ein hindernisvermeidender Roboter, der über ein Ultraschallsensor-Modul verfügt, mit dem er die Distanz zwischen sich selbst und Objekten in seiner Nähe erfassst. Wenn laut Ibrahim: „die Entfernung zum Objekt 50 cm oder weniger beträgt, dreht sich der Roboter nach links, bis er innerhalb von 50 cm keine Objekte mehr findet und geht dann erst vorwärts.“ Lassen Sie sich vom gut geschriebenen Code in Kapitel 2 zu einem ähnliches Projekt anregen.
Das Elektor Magazine gehört seit 65 Jahren zu den führenden Informationsquellen für Elektronikingenieure, Entwickler, Start-ups und Unternehmen. Unser Magazin wird von einer aktiven Community aus Elektronikingenieuren – von Studenten bis zu Profis – getragen, die mit Leidenschaft innovative Ideen entwickeln und teilen.
Für diese veröffentlichen wir jedes Jahr Hunderte von Beiträgen in Formaten wie Artikeln, Videos, Webinaren und weiteren Lernformaten. Unsere Mission ist es, Wissen auf jede mögliche Weise zu teilen und die Leser mit den neuesten Entwicklungen im Bereich der Elektrotechnik zu inspirieren.
Vielen Dank für Ihre Bewertung!
Kommentar hinzufügen
Vielen Dank für Ihre Bewertung!
Möchten Sie einen Kommentar mit Ihrer Bewertung hinterlassen? Bitte melden Sie sich unten an. Nicht gewünscht? Dann schließen Sie einfach dieses Fenster.

Diskussion (0 Kommentare)