
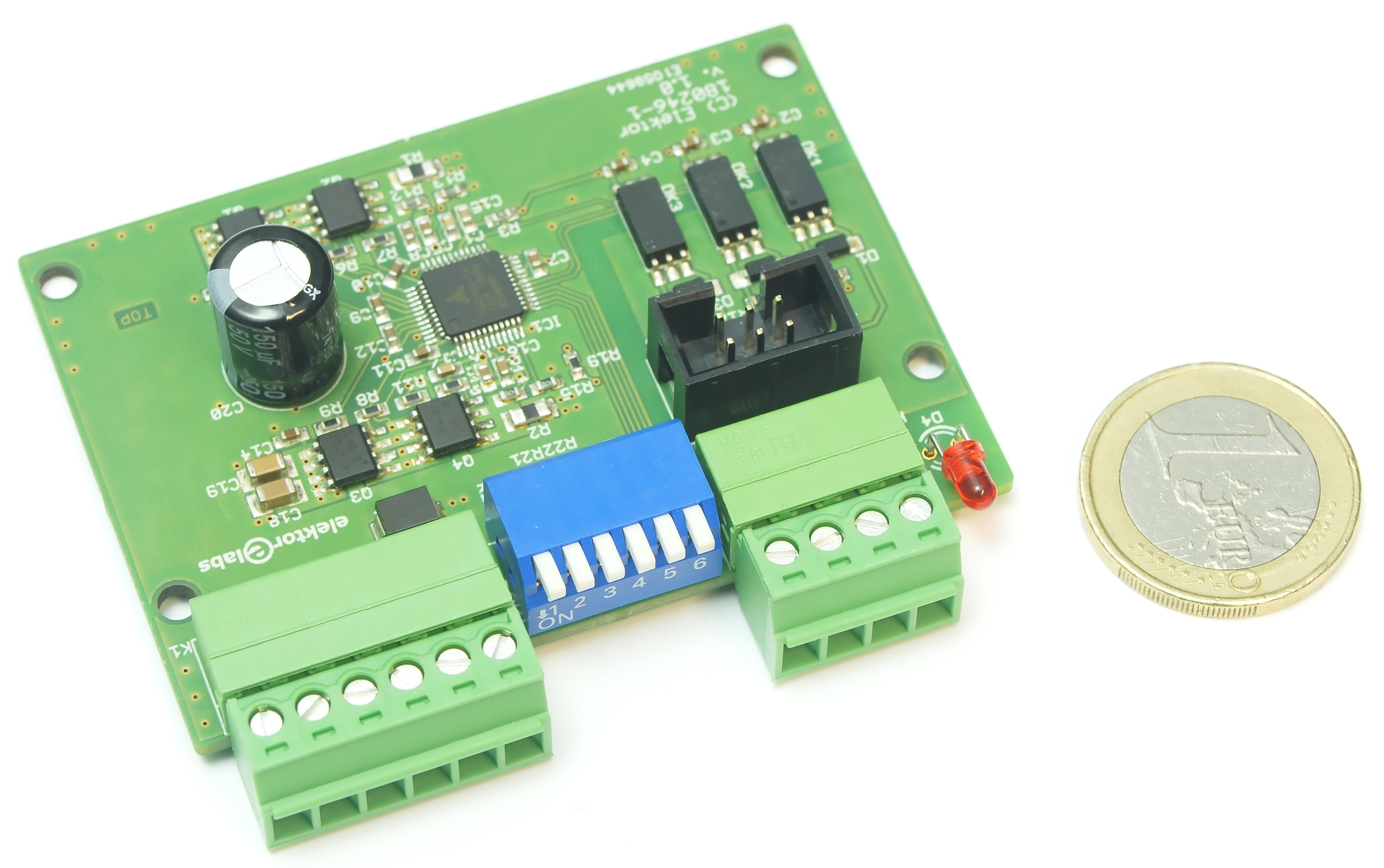
Motortreiber-Board mit TMC2160
Stark und leise
Lesen Sie diesen Artikel mit einer Elektor-Mitgliedschaft weiter!
Schließen Sie sich Zehntausenden von Ingenieuren und Elektronik-Enthusiasten weltweit als Mitglied an. Genießen Sie den Zugriff auf das Elektor Magazine, das Elektor-Archiv, exklusive Rabatte,
frühzeitige Benachrichtigungen zu Academy-Pro-Produkten und vielem anderen mehr. Wählen Sie noch heute eine Mitgliedschaft
und entdecken Sie das gesamte Angebot von Elektor. Loggen Sie sich hier ein, wenn Sie bereits Mitglied sind.

PRINT (Gold)
- 8x Elektor Mag (Print)
- 8x Elektor Mag (Digital)
- Zugang zum Elektor-Archiv*
- Zugang zu 5.000+ Gerber-Files
- 10% Rabatt im Elektor Store*
plus 20 Euro Lieferkosten.
* Mitgliederrabatt und unbegrenzter Zugang zum gesamten Archiv nur für GOLD bzw. GREEN Vollmitglieder. Probemitglieder haben eingeschränkten Zugang zum Online-Archiv.

DIGITAL (Green)
- 8 x Elektor Mag (Print)
- 8x Elektor Mag (Digital)
- Zugang zum Elektor-Archiv*
- Zugang zu 5.000+ Gerber-Files
- 10% Rabatt im Elektor Store*
* Mitgliederrabatt und unbegrenzter Zugang zum gesamten Archiv nur für GOLD bzw. GREEN Vollmitglieder. Probemitglieder haben eingeschränkten Zugang zum Online-Archiv.

DIESEN ARTIKEL KAUFEN (PDF)
Gerber-Datei
Die zu diesem Projekt gehörende Platine steht als Gerber-Datei exklusiv allen Green- und Gold-Mitgliedern zum sofortigen Download zur Verfügung. Mit Gerber-Daten können Sie Platinen selber herstellen oder sie bei einem Platinenhersteller in Auftrag geben.
Gerber-Dateien unterliegen der Creative Commons-Lizenz. Creative-Commons bietet Urhebern die Möglichkeit, dass ihre Werke frei genutzt und verbreitet werden.
Bauteile
Die Stückliste (Bill of Materials, BOM) ist eine technisch vollständige Auflistung aller Teile und sonstigen Hardware-Komponenten, die zur Herstellung des funktionsfähigen und getesteten Prototyps eines Elektor Labs-Projekts verwendet werden. Die Stückliste enthält detailliertere Informationen als die im Elektor Magazine veröffentlichte Komponentenliste für dasselbe Projekt. Bei Bedarf wird die Stückliste direkt von unseren Laboringenieuren aktualisiert. Als Leser können Sie die Liste hier herunterladen. Möchten Sie mehr über unsere Stückliste erfahren? Weitere Informationen finden Sie im Artikel Stückliste.
Want to build a project?
Bring your design to life with the Elektor PCB Service, powered by Eurocircuits. Upload the project files and order professionally manufactured PCBs or assembled boards through a proven European production platform.
Supporting KiCad, Eagle, Gerber, and ODB++ formats, the service is suitable for everything from prototypes and validation builds to series production and volume manufacturing.
Made in Europe. Fast. Reliable. Professional.
Materialliste
Stückliste
[Illustration 190255-001]
[Illustration 190255-002]
Widerstände:
Standard: SMD 0603, 1 %, 100 mW
R1,R2 = 75 mΩ, 1 W, SMD 1206
R3 = 2Ω2
R4..R11 = 22 Ω
R12..R15 = 47 Ω
R16..R18 = 390 Ω
R19 = 1 k
R20..R23 = 47 k
Kondensatoren:
Standard: SMD 0603, 50 V
C1 = 22 n
C2..C8 = 100 n
C9..C12 = 220 n
C13,C14 = 470 n
C15 = 470 n, X5R, 16 V
C16,C17 = 2µ2, X5R, 25 V
C18,C19 = 10 μ, X5R, 50 V, SMD 1206
C20 = 150 μ, 5.000 h/105°C
Halbleiter:
D1..D3 = 1N4148, SOD-123
D4 = LED, rot, 3 mm
D5 = SMBJ36A
IC1 = TMC2160TA (TQFP48-EP) Trinamic
OK1..OK3 = TLP2745 (TP,E)
Q1..Q4 = AO4882
Außerdem:
K1 = MC1,5/6-G-3,81 + MC 1,5/6-ST-3,81, Phoenix Kontakt
K2 = MC 1,5/4-G-3,81 + MC 1,5/4-ST-3,81, Phoenix Kontakt
K3 = 6-pol. Wannenstecker, 2×3, vertikal, RM 0,1''
S1 = 6-facher DIP-Schalter, Klavier-Typ, RM 0,1''
Bestell-Tipp:


Diskussion (0 Kommentare)