
Hinderniserkennung mit Ultraschall
über
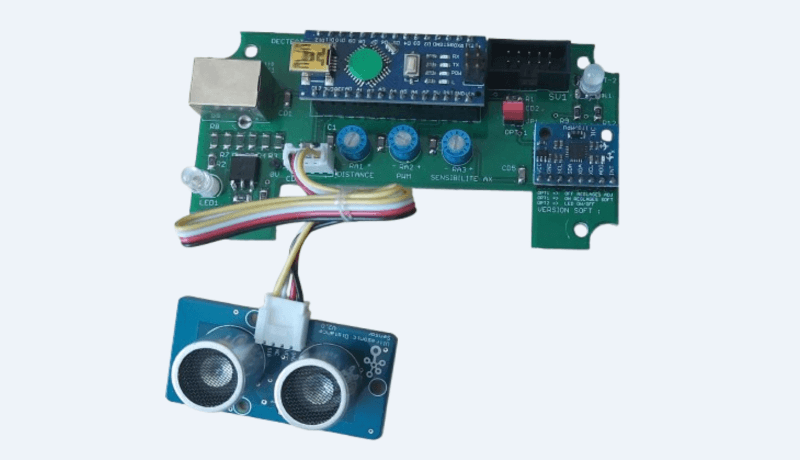
Lesen Sie, wie aus einem einfachen Ultraschallsensor, einem Vibrationsmotor und ein oder zwei Mikrocontrollern ein praktisches Upgrade für eine Gehhilfe wurde. Dieses Ultraschall-Hinderniserkennungsmodul ist in der Lage, Objekte in bis zu vier Metern Entfernung zu erkennen.
Projektübersicht
Dieses Projekt geht auf eine Anfrage meines Onkels zurück, der in einem Altersheim lebte und erhebliche Sehprobleme hatte. Er benutzte eine Gehhilfe, hatte aber Schwierigkeiten, Hindernisse auf seinem Weg zu erkennen, was eine tägliche Herausforderung darstellte. Um ihm zu helfen, sich so gut wie möglich fortzubewegen, habe ich ein Modul zur Hinderniserkennung mit Ultraschall entwickelt. Es ist in der Lage, Objekte in einer Entfernung von bis zu 4 m mit einem Erfassungswinkel von etwa 20° zu erkennen. Wenn ein Hindernis erkannt wird, leuchtet eine rote LED auf, und ein Mikromotor wird aktiviert, um Vibrationen am Rahmen der Gehhilfe zu erzeugen, die der Benutzer als Warnung wahrnehmen kann....


