
Roboter begreift Eigentum und Normen
26. Dezember 2018
über
über
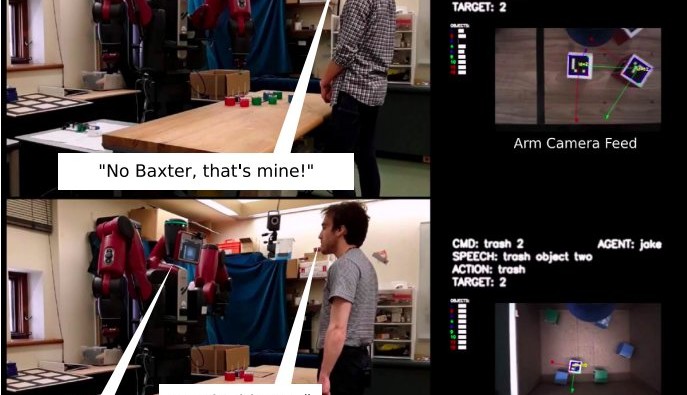
Ein Forscherteam der Yale University hat ein Robotersystem entwickelt, das Eigentumsbeziehungen und Normen erlernen kann. Diese Experimente befassen sich mit den komplexen Herausforderungen, die mit dem Erlernen sozialer Normen für Roboter verknüpft sind.
Mit zunehmender Verbreitung von Robotern ist es wichtig, wie diese mit Menschen effektiv und angemessen kommunizieren zu können. Ein Schlüsselaspekt menschlicher Interaktion ist das Verstehen und Verhalten nach sozialen und moralischen Normen. Eigentumsnormen helfen, sozialen Umgang auf eine Weise zu ermöglichen, die rücksichtsvoll gegenüber anderen ist. Solche Normen bei Robotern könnten ihre Interaktionen mit Menschen verbessern, so dass sie zwischen eigenen Werkzeugen und denen von Anderen unterscheiden können.
In dem von Scassellati, Xuan Tan und Jake Brawer entwickelten Ansatz wird das Eigentum als ein Diagramm der probabilistischen Beziehungen zwischen Objekten und ihren Eigentümern dargestellt. Dies wird mit einer Datenbank von prädikatsbasierten Normen kombiniert, die die Aktionen einschränken, die der Roboter mit eigenen Objekten ausführen darf.
Eine der Herausforderungen ist, dass einige der Methoden des Erlernens von Eigentumsbeziehungen durch explizite Aufforderungen entstehen (z. B. „Nimm nicht meine Werkzeuge“) und andere durch Erfahrung gelernt werden. Laut Scassellati ist die Kombination dieser beiden Arten des Lernens für Menschen einfach, aber für Roboter viel schwieriger.
Das von den Forschern entwickelte System kombiniert einen neuen inkrementellen Norm-Lernalgorithmus, der sowohl einmaliges Lernen als auch Induktion aus Beispielen ermöglicht, mit Bayes'scher Ableitung von Eigentumsbeziehungen als Reaktion auf offensichtliche Regelverstöße und wahrnehmungsbasierter Vorhersage der wahrscheinlichen Eigentümer eines Objekts. Zusammengenommen ermöglichen diese Komponenten dem System, die Eigentumsnormen und -beziehungen zu erlernen, die in einer Vielzahl von Situationen anwendbar sind.
Mit zunehmender Verbreitung von Robotern ist es wichtig, wie diese mit Menschen effektiv und angemessen kommunizieren zu können. Ein Schlüsselaspekt menschlicher Interaktion ist das Verstehen und Verhalten nach sozialen und moralischen Normen. Eigentumsnormen helfen, sozialen Umgang auf eine Weise zu ermöglichen, die rücksichtsvoll gegenüber anderen ist. Solche Normen bei Robotern könnten ihre Interaktionen mit Menschen verbessern, so dass sie zwischen eigenen Werkzeugen und denen von Anderen unterscheiden können.
In dem von Scassellati, Xuan Tan und Jake Brawer entwickelten Ansatz wird das Eigentum als ein Diagramm der probabilistischen Beziehungen zwischen Objekten und ihren Eigentümern dargestellt. Dies wird mit einer Datenbank von prädikatsbasierten Normen kombiniert, die die Aktionen einschränken, die der Roboter mit eigenen Objekten ausführen darf.
Eine der Herausforderungen ist, dass einige der Methoden des Erlernens von Eigentumsbeziehungen durch explizite Aufforderungen entstehen (z. B. „Nimm nicht meine Werkzeuge“) und andere durch Erfahrung gelernt werden. Laut Scassellati ist die Kombination dieser beiden Arten des Lernens für Menschen einfach, aber für Roboter viel schwieriger.
Das von den Forschern entwickelte System kombiniert einen neuen inkrementellen Norm-Lernalgorithmus, der sowohl einmaliges Lernen als auch Induktion aus Beispielen ermöglicht, mit Bayes'scher Ableitung von Eigentumsbeziehungen als Reaktion auf offensichtliche Regelverstöße und wahrnehmungsbasierter Vorhersage der wahrscheinlichen Eigentümer eines Objekts. Zusammengenommen ermöglichen diese Komponenten dem System, die Eigentumsnormen und -beziehungen zu erlernen, die in einer Vielzahl von Situationen anwendbar sind.
Mehr anzeigen
Weniger anzeigen
Diskussion (2 Kommentare)