
Review: SunFounder Remote Control Crawling Quadruped Robot V2.0
über


Die Schachtel ist mit Teilen gut gefüllt. Wie immer ist es empfehlenswert, zuerst den Inhalt eines jeden Bausatzes zu überprüfen:
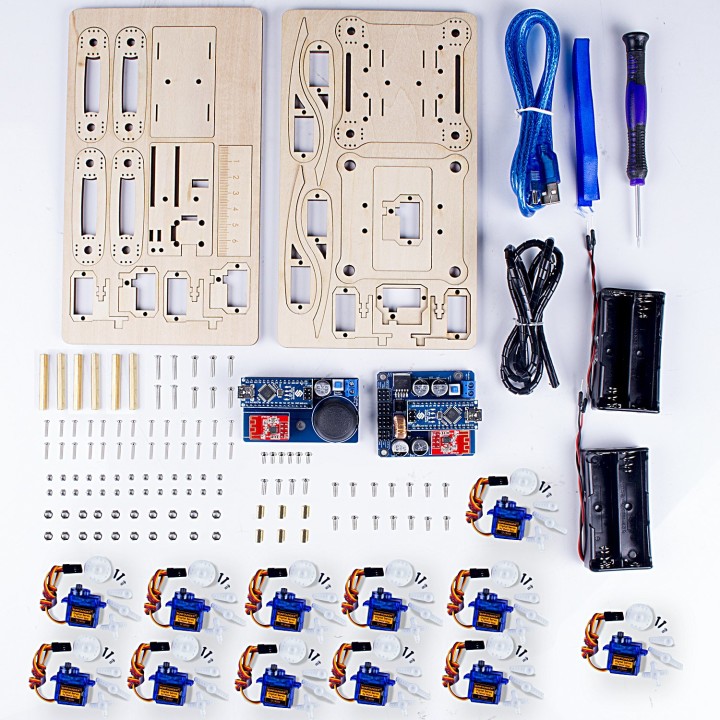
Lieferumfang
Ein gedrucktes Handbuch mit Stückliste fehlt – dafür gibt eine Karte mit einem Link zum Download der Dokumentation und der Software. Da ich nicht den ganzen Link eintippen wollte, ging ich gleich auf die SunFounder-Seite und suchte den direkten Weg zur Baubeschreibung. An sich ist an dieser Methode nichts verkehrt, aber erst im Nachhinein entdeckte ich, dass genaues Lesen geholfen hätte: In der Liste der verfügbaren Handbücher klickte ich auf den ersten Link mit „Quadruped“ und schon hatte ich das falsche Handbuch auf der Platte. Die Stückliste war deshalb nicht korrekt (das hätte mich dann spätestens misstrauisch machen sollen!) und so begann ich gegen ein sanftes Gefühl mit dem Holzweg „direkter Bau des Roboters“ – bloß um doch herauszufinden, dass es so nicht funktioniert...Mir ging es wie Vielen: Zuerst wird natürlich der Hersteller beschuldigt, um später dann doch mit Scham festzustellen, dass sich der Name des Bausatzes nicht ohne Grund mit dem Zusatz „V2.0“ schmückt. Ein wenig weiter in der Liste ist das richtige Handbuch mit der richtigen Stückliste verlinkt (dieser Link ist korrekt). Immerhin fast ganz richtig, denn darin wird immer noch von „Acrylplatten“ gesprochen, während das Skelett im Paket 2.0 aus Holzteilen besteht ;-)
Die Akkus für diesen Roboter-Kit sind nicht im Lieferumfang enthalten. Sie sind eine Nummer größer als die gebräuchlicheren AA-Batterien (entspricht etwa dem Format 14500), denn es sind Li-Ion-Akkus des Typs 18650 mit 3,7 V Nennspannung vorgesehen, die nicht jeder zu Hause haben wird. Keine schlechte Wahl übrigens, denn diese Zellen und ihre Ladegeräte sind nicht zu teuer, bieten ausreichend Energie und sind auch einigermaßen gut verfügbar. Aufgrund der höheren Energiedichte benötigen sie weniger Platz als ein vergleichbares Paket aus NiCd- oder NiMH-Akkus. Wie auch immer: Man muss sie erst haben, um wirklich mit diesem Roboter spielen zu kommen.
Während des Aufbaus, des Testens und der Justierung – was wirklich erforderlich ist – können Sie den Roboter aber auch per Labor-Netzteil mit 7,5 V versorgen. Am Ende muss der Roboter autonom mit Energie versorgt werden, sonst macht er keinen Sinn. Meine 18650er Akkus machten zunächst etwas Probleme in den Batteriehaltern und hatten nicht sofort guten Kontakt. Der Federdruck war nicht hoch genug, aber wenn man sie gut an die Kontakte drückt, ist es das Problem gefixt.
Aufbau
Mit der richtigen Beschreibung war die Konstruktion dann viel einfacher. Die Anleitung ist sehr klar, gut illustriert und in logische Schritte unterteilt. Sie können leicht am Ende einer Bauphase pausieren und z. B. erst einen Tag später fortfahren. Sich Zeit zu nehmen ist angesichts des für ein funktionierendes Endergebnis erforderlichen Arbeitsaufwands kein Luxus. Es ist kein Bausatz, den man eben mal nebenbei schnell zusammenschustern kann. Sie sollten sich Zeit nehmen und zwischendurch auch einmal ausruhen!Der mitgelieferte Schraubendreher passt perfekt zu den kleinen Schrauben und kann auch magnetisiert werden, was manchmal nützlich ist. Es ist auch hilfreich (lies: notwendig), ein paar Zangen oder Pinzetten zu haben, um die Muttern während der Montage an ihrem Platz zu halten:

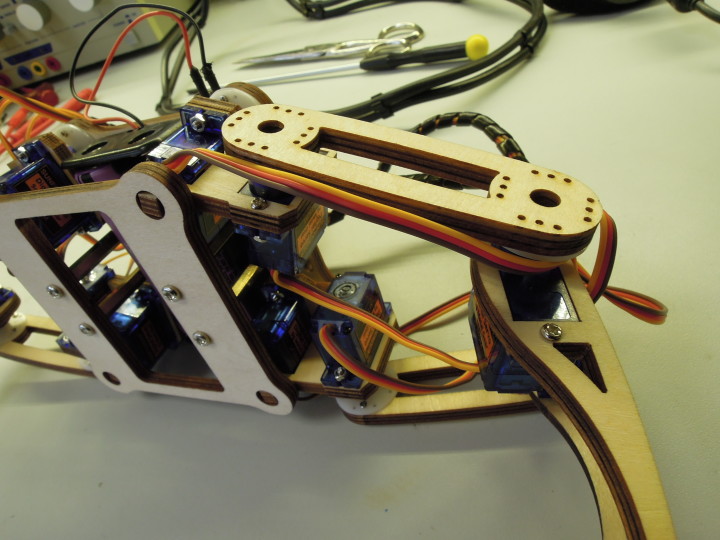
Glücklicherweise hat SunFounder einige Schrauben und Muttern mehr als nötig beigegeben, so dass es keine Katastrophe ist, wenn mal etwas auf Nimmerwiedersehen runterfällt. Alles passt sehr gut, alle Teile sind schön auf Maß gefertigt und sehr sauber verarbeitet. Nur die Stecker der Servos sind etwas eng aneinandergereiht, was etwas mehr Kraft erfordert, um sie in Position zu bringen, aber das ist sicherlich kein großes Hindernis.
Irgendwann stehen Sie vor einem komplett montierten Roboter. Hier steht in der Anleitung, dass Sie die Kabel der Servos sauber mit Hilfe des mitgelieferten Wickelschlauchs organisieren sollen. Logischerweise sollten sich die Beine des Roboters nicht in der Verkabelung verheddern, wenn sich der Roboter in Bewegung setzt. Schön und gut, aber ein wenig mehr Erklärung dazu, wie man das macht, wäre willkommen gewesen.
Ich habe mir nach „Pi x Daumen“ vier Stücke von etwas mehr als 10 cm zurechtgeschnitten, mit denen ich die drei Kabel vom Servo-Board jeweils an jedem Bein befestigt habe. Tatsächlich war noch genug von diesem Schlauch für spätere Verschönerungen übrig. Erst dieses Feintuning hat dann ein ziemlich zufriedenstellendes Ergebnis gebracht. Werfen Sie einen Blick auf die ersten „Gehversuche“ und schauen, ob die Verkabelung nicht zu fest oder zu locker ist. Gegebenenfalls passen Sie dann die Kabelführung nochmals an.
Kalibrierung
Jetzt muss der Roboter noch eingestellt werden. Die Servos und damit die Position der Segmente der Beine in der Software müssen so eingestellt werden, dass dieser vierbeinige Freund gut laufen kann. Auch wenn dieses Einstellverfahren klar beschrieben ist, gestaltet sich die Praxis etwas schwieriger als die Theorie. Ein Papierdiagramm und ein Lineal sind enthalten, um die Position der Beine zu messen, aber das funktioniert nicht wirklich gut. Es ist nicht so einfach, den Roboter für die Messungen passend auf dem Papier auszurichten, aber glücklicherweise hört er nicht so genau zu und man kommt mit etwas Probieren schließlich doch zu einem einsatzbereiten Roboter.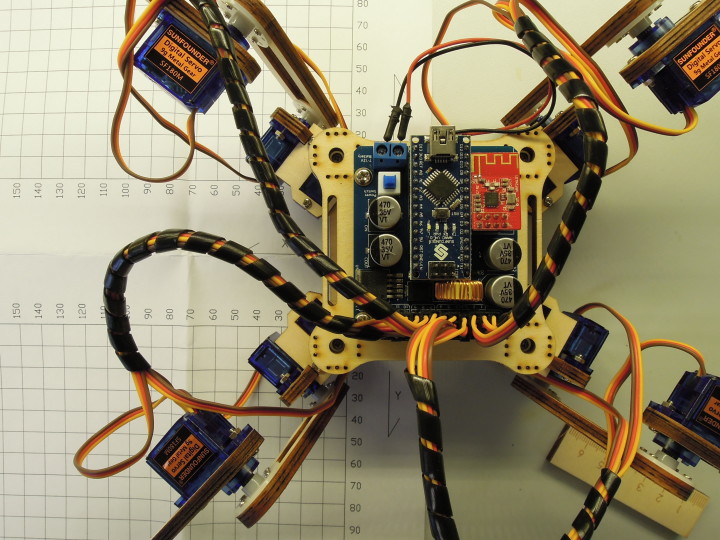
Nun kann man den Roboter herumlaufen lassen und ihn mit der Fernbedienung steuern (oder mit den Arduino-Sketches im Download tanzen lassen). Natürlich können Sie die Software auch selbst modifizieren. Das Handbuch erklärt auch, wie die Bewegung der Beine in Software umgesetzt wird, aber das ist eine gute Sache für fortgeschrittene Anwender.

Fazit
Nach Angaben des Herstellers wurde dieses Kit für die Ausbildung entwickelt, um Kindern die Themen Robotik und Arduino-Software näher zu bringen. Ich denke, dass die Anleitung für Leute mit etwas Grundwissen nützlich ist. Doch auch ohne zu viel Knowhow wird es irgendwann jedem gelingen, den Roboter zum Funktionieren zu bringen. Beim Handbuch gibt es (fast) nichts zu bemängeln. Die mechanischen Teile sind gut durchdacht und präzise gefertigt. Die Erläuterungen zur Arduino-Software sind ebenfalls klar und einfach, auch wenn klar ist, dass dieser für Menschen mit wenig oder gar keiner Erfahrung in diesem Bereich ziemlich schwierig zu verstehen sein wird.Was auch immer man mit dem Roboter macht: Der Aufbau alleine ist auf jeden Fall schon eine prima Bastelparty (auch für Erwachsene!), die viel Spaß macht.
Diskussion (0 Kommentare)