Der Roboterfinger bewegt sich wie ein echter. (Foto: Marc Teyssier)
MobiLimb ist ein Zusatzteil für tragbare Geräte, das seine Form verändern kann. Es handelt sich um einen kleinen seriellen Roboter-Manipulator (mit fünf Freiheitsgraden), der leicht an bestehende mobile Geräte (Smartphone, Tablet) angebracht werden kann und die Möglichkeiten des Mobilgeräts erweitert.
Nun, nicht eine ganze Hand, aber wenigstens einen Finger! MobiLimb ist das fühlbare Ergebnis eines Forschungsprojekts von Marc Teyssier, Gilles Bailly, Catherine Pelachaud und Eric Lecolinet (Telecom ParisTech, Sorbonne und CNRS).
Was ist MobiLimb?
MobiLimb ist ein Zusatzteil für tragbare Geräte, das seine Form verändern kann. Es handelt sich um einen kleinen seriellen Roboter-Manipulator (mit fünf Freiheitsgraden), der leicht an bestehende mobile Geräte (Smartphone, Tablet) angebracht und ebenso leicht wieder entfernt werden kann. Ähnlich wie bei Prothesen, die die Grenzen des menschlichen Körpers überwinden, will MobiLimb die Möglichkeiten von Geräte, die zwar mobil genannt werden, aber dennoch statisch, passiv und unbeweglich sind, mit Hilfe eines Roboterfingers erweitern.
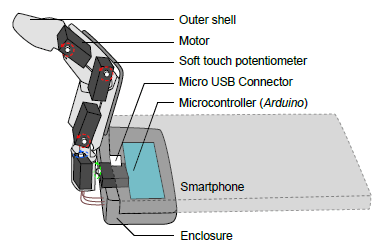
Die Hardware von MobiLimb (Abbildung: Marc Teyssier)
Formfaktor
Dieser Ansatz beeinflusst weder den Formfaktor mobiler Geräte noch die Effizienz ihrer I/O-Fähigkeiten – im Gegenteil, er erweitert sie:
Benutzer können den Roboterfinger manipulieren und seine Form ändern (Eingabe)
Benutzer können den Roboterfinger sehen und fühlen (visuelles und taktiles Feedback), auch und gerade dann, wenn seine Form durch das mobile Gerät dynamisch verändert wird
Als Manipulator kann der Roboterfinger mit weiteren Modulelementen (LEDs, Sensoren) ausgestattet werden.
Wie funktioniert MobiLimb?
MobiLimb besteht aus fünf beweglichen Gelenken in einer Reihe. Es kommen Servomotoren, Sensoren, eingebettete Elektronik und ein Controller zum Einsatz.
Als Stellglieder wurden fünf Servomotoren des Typs PZ-15320 eingesetzt, die eine ausreichende Leistung entwickeln können. Die ersten beiden Motoren sind rechtwinklig zueinander auf der Basis montiert und tragen die anderen drei Motoren in Reihe. Eine 3D-Druckstruktur hält die Motoren zusammen, ohne ihre Bewegungen zu behindern.
Die Servomotoren stellen ihre Position (Drehung) als Rückmeldung zur Verfügung. Darauf aufbauend kann die Position berechnet werden. Zusätzlich ist ein flexibles Potentiometer vorgesehen, das erkennt, wenn und wo der Benutzer das MobiLimb berührt.
In der Basis des MobiLimb ist ein Arduino Leonardo Pro Micro untergebracht, der für die Steuerung verantwortlich ist. Die Forscher haben eine Android/Unity-API namens Uduino entwickelt, die es ermöglicht, Animationen zu erstellen, zu speichern und abzuspielen.
Ästhetik
Es wurden mehrere „Abdeckungen“ für den MobiLimb entwickelt: ein klassischer Roboterfinger, einer mit Fell und auch einer, der wie ein „echter“ Finger aussieht (aus dem gleichen Material, das auch in der Filmindustrie verwendet wird).
UIST
MobiLimb wird offiziell auf dem User Interface and Technology Symposium (UIST) in Berlin vom 14. bis 17. Oktober 2018 vorgestellt.
Das Elektor Magazine gehört seit 65 Jahren zu den führenden Informationsquellen für Elektronikingenieure, Entwickler, Start-ups und Unternehmen. Unser Magazin wird von einer aktiven Community aus Elektronikingenieuren – von Studenten bis zu Profis – getragen, die mit Leidenschaft innovative Ideen entwickeln und teilen.
Für diese veröffentlichen wir jedes Jahr Hunderte von Beiträgen in Formaten wie Artikeln, Videos, Webinaren und weiteren Lernformaten. Unsere Mission ist es, Wissen auf jede mögliche Weise zu teilen und die Leser mit den neuesten Entwicklungen im Bereich der Elektrotechnik zu inspirieren.
Vielen Dank für Ihre Bewertung!
Kommentar hinzufügen
Vielen Dank für Ihre Bewertung!
Möchten Sie einen Kommentar mit Ihrer Bewertung hinterlassen? Bitte melden Sie sich unten an. Nicht gewünscht? Dann schließen Sie einfach dieses Fenster.


Diskussion (0 Kommentare)