
HyTAQ: Roboter fährt, fliegt und springt
über
Den Forschern Arash Kalantari und Matthew Spenko vom Robotics Lab des IIT (Illinois Institute of Technology, USA) gelang die Entwicklung eines Quadrocopters, der nicht nur fliegen kann, sondern sich auch auf dem Boden fortbewegt. Da bei der Fortbewegung am Boden lediglich der Rollwiderstand überwunden werden muss, benötigt diese Art des Vorwärtskommens deutlich weniger Energie als das Fliegen. Damit ergibt sich also eine Lösung für eines der größten Handicaps eines Quadrocopters: die kurze Zeit, die der Akku reicht.
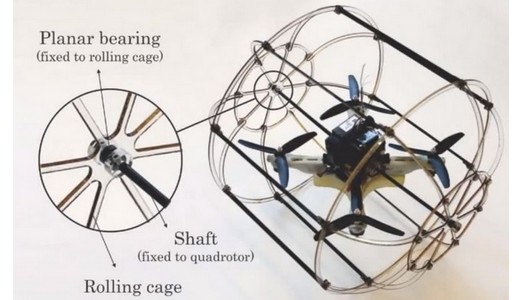
Beim HyTAQ (Hybrid Terrestrial and Aerial Quadrotor) wird wie für Quadrocopter namensgebend beim Antrieb auf vier Propeller gesetzt. Da der Copter in einer Art Käfig aufgehängt ist, kann er sich z.B. durch Rollen fortbewegen, wobei der konventionelle Antrieb und die gängige Steuerung verwendet wird. Bei den Experimenten zeigte sich, dass die Konstruktion auf diese Weise mit einer Akkuladung eine vierfach größere Strecke zurück legen kann als beim Fliegen. Anders als bei einem konventionellen Landfahrzeug aber stellen Hindernisse kein Problem dar, da sie einfach überflogen werden können.
Diskussion (0 Kommentare)