
Adam Taylors MicroZed Chroniken, Teil 203:
Um dieses Design zu aktualisieren, werden wir folgendes machen:
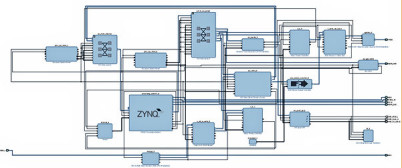
1. wir fügen einen AXI QSPI hinzu, der für 16-Bit-Standard-SPI konfiguriert ist
2. wir aktivieren das PS I2C-Routing, das Signal über die EMIO
3. Mapping von sowohl I2C als auch die SPI I / O an den Schirmanschluss der angeschlossenen Arty Z7- Board
Wir können dann die auf dem Zynq-Prozessorkern laufende Software aktualisieren, um das Kameramodul zu steuern, den VoSPI zu empfangen und den HDMI-Ausgangskanal zu konfigurieren.
Für dieses Beispiel habe ich die Breakout-Platine mit dem Kameramodul verbunden, so daß die SDA- und SCL-Pins auf dem Schirmanschluss und der Breakout-Platine ausrichtet sind. Dies bedeutet, daß wir die IO10 zu IO13 Pins des Schirmanschlusses für den VoSPI verwenden können. Wir verwenden IO11 nicht, was die SPI-Schnittstelle der MOSI wäre, da dieses Signal in dieser Anwendung nicht verwendet wird.
Wenn wir diesen Ansatz jedoch verwenden, müssen wir dem Breakout Board und dem Kameramodul auch ein zusätzliches Leistungssignal zur Verfügung stellen, da der Schirmanschluss am Arty Z7 nicht in der Lage ist, die auf dem A Pin benötigte 5V zu liefern. Statt dessen ist es mit einem Zynq I / O Pin verbunden. Deshalb habe ich einen Draht aus dem 5V-Pin des Schirmanschlusses auf der gegenüberliegenden Seite verwendet, um die Lepton-Breakout-Board-5V-Stromversorgung mit Strom zu versorgen.
Mit der Hardware in Betrieb gesetzt und das Vivado Design wieder aufgebaut, können wir dann SDK öffnen und die Software nach Bedarf aktualisieren, um das Bild anzuzeigen. Wir werden dies das nächste Mal sehen.
Von Adam Taylor
Link zum Produkt Arty-Z7:
http://store.digilentinc.com/arty-z7-apsoc-zynq-7000-development-board-for-makers-and-hobbyists/
Link zum GitHub-Server:
https://github.com/Digilent/Arty-Z7-20-hdmi-out
Mehr anzeigen
Weniger anzeigen
Diskussion (0 Kommentare)