| Suministrada en una caja de DVD, la nueva tarjeta de evaluación para la familia de microcontroladores de 16 bits, PIC24F, de Microchip, vien...

Elektor Team (12080)
5 € (für Mitglieder GRATIS)
5 € (für Mitglieder GRATIS)

| Un osciloscopio USB es una buena alternativa a un osciloscopio normal para el laboratorio de un aficionado. Estos aparatos de medición son p...
5 € (für Mitglieder GRATIS)

| “Con un buen amplificador todo lo que oímos es música.”En Diciembre de 1982, Elektor sorprendió al mundo con un amplificador final MOSFET de...
5 € (für Mitglieder GRATIS)

| Naturalmente hemos visto Sudokus que se pueden resolver online y sabemos que existen muchos programas habilidosos para “craquear” estos romp...
5 € (für Mitglieder GRATIS)
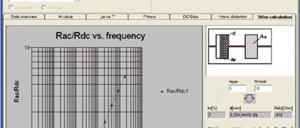
| Vários fabricantes de componentes electrónicos fornecem nos seus sites de Internet ferramentas para projecto de circuitos electonicos para u...
5 € (für Mitglieder GRATIS)

| Embora os motores eléctricos sem escovas tenham em larga escala substituído os motores de combustão interna nos modelos de aeronaves, de peq...
5 € (für Mitglieder GRATIS)

| A recepção directa de TV via satélite não é ainda uma realidade, sendo necessário a instalação de uma antena parabólica e um receptor adequa...
5 € (für Mitglieder GRATIS)

| Inspirado num relógio binário que viu num museu de matemática, o autor deste projecto deu um passo em frente, e criou um modelo matematicame...
5 € (für Mitglieder GRATIS)

| Esta placa microcontroladora universal foi projectada, principalmente, para ser usada por estudantes de tecnologias para automóvel, mas pode...
5 € (für Mitglieder GRATIS)
| Artigo original: Water Alarm - December 2007(do suplemento i-Trixx 2007)