
Nichts für Anfänger – Makerfabs 6 DOF Robot Arm mit Raspberry Pi Pico
über

Worum handelt es sich?
Der 6-DOF-Roboterarm mit Raspberry Pi Pico ist ein Roboterarm, der von einem Raspberry Pi Pico Mikrocontroller-Board gesteuert wird. „DOF“ ist die Abkürzung für „Degrees of Freedom“ (Freiheitsgrade), was sich bei einem Roboterarm auf die Gelenke bezieht. Der hier vorgestellte Arm hat sechs, sodass er sich um sechs unabhängige Achsen bewegen kann. Jeder DOF entspricht einem Servo.
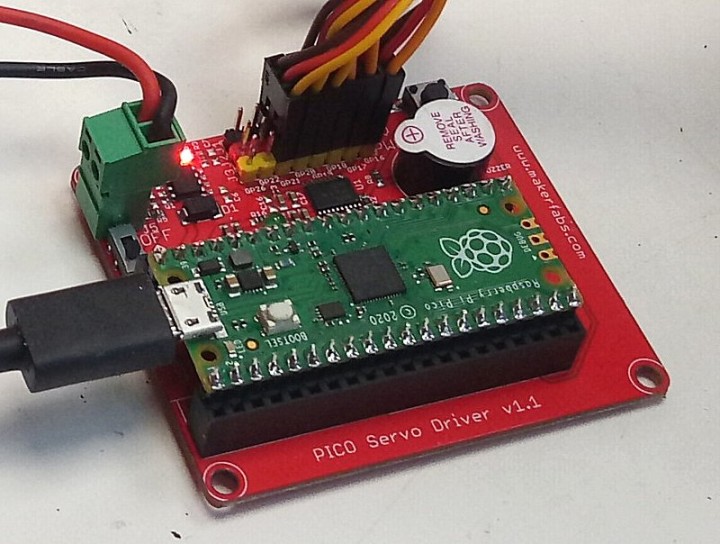
Der Arm wird von einem Raspberry Pi Pico gesteuert – dieser steckt auf einer kleinen Erweiterungsplatine, die die Anschlüsse für die Servos, die Stromversorgung, einen Summer und einen Drucktaster bereitstellt. Die RP2040-MCU des Pico soll in MicroPython programmiert werden, aber das ist natürlich nicht obligatorisch. Der Treiber und die Beispiele sind jedoch in MicroPython geschrieben.
(Fast) alles inklusive
Der Roboterarm wird als vollständiger Bausatz mit allen Teilen geliefert. Ein Netzteil mit 5 VDC / 6 A wird mitgeliefert, ebenso ein Netzkabel – dieses hat allerdings einen amerikanischen Stecker und muss daher ersetzt oder mit einem Adapter versehen werden. Ansonsten wird außer einem Computer für die Programmierung und einem Micro-USB-Kabel nichts weiter benötigt. Es gibt sogar einen kleinen Schraubendreher, aber ich habe lieber meine eigenen Werkzeuge verwendet.

Es gibt eine ganze Reihe von Teilen und noch mehr Schrauben und Muttern, von denen einige aber Ersatzteile sind. Bis auf die Grundplatte aus Acryl und den „Armknochen“ aus Stahl sind alle Teile aus Aluminium. Wenn man sie richtig zusammensetzt, erhält man kein wackeliges Plastikspielzeug, sondern einen starken, soliden Metallarm. Obwohl fast alles aus Aluminium ist, wiegt der zusammengebaute Arm 1,3 kg (ohne Netzteil).
Nur als Lernwerkzeug gedacht
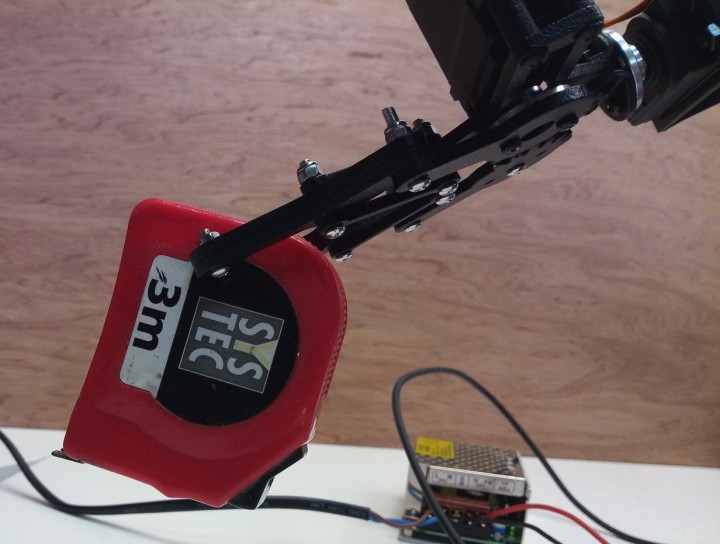
Der 6-DOF-Roboterarm ist vor allem ein Lehrmittel, um die Programmierung in MicroPython zu lernen. Er ist ein spaßiges Gerät, das sich auf viele Arten bewegen kann, und er kann kleine Gegenstände wie sein eigenes Netzteil (ca. 6 cm × 4 cm × 8,5 cm) aufheben. Wie ein Demo-Video zeigt, kann man damit z. B. das Spiel „Türme von Hanoi“ spielen. Für industrielle Anwendungen oder hochpräzise Aufgaben ist er nicht geeignet. Er hat zwar einen Greifer, aber ich würde ihm mit einem Werkzeug darin nicht trauen.
Was Sie vorab wissen sollten
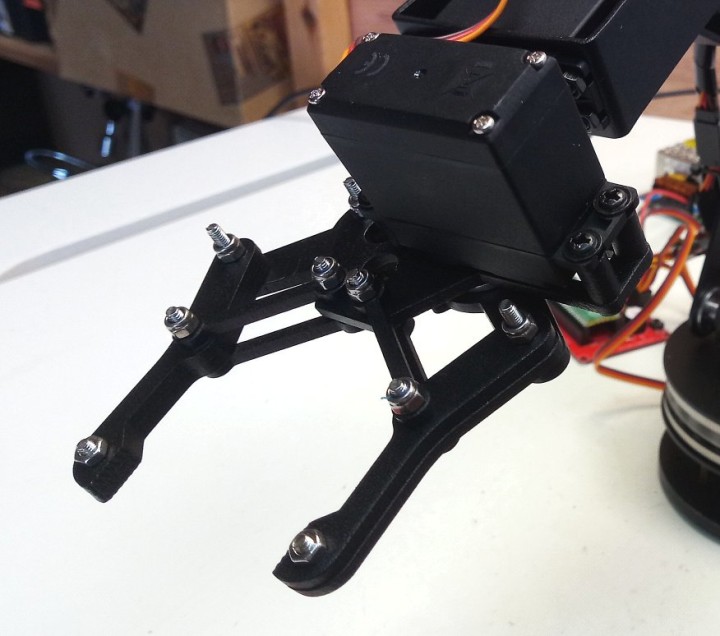
Der Zusammenbau ist nichts für Halbherzige. Die Anleitung (nicht mitgeliefert, man muss selbst danach suchen) ist nur auf Chinesisch und obendrein unklar und unvollständig. Es gibt ein kurzes Video zum Zusammenbau, aber auch das ist unvollständig. Mit etwas Geduld und gesundem Menschenverstand ist der Zusammenbau jedoch machbar, da die Konstruktion nicht sehr kompliziert ist. Das einzige komplexe Teil, der Greifer, ist bereits vormontiert. Allerdings gibt es ein paar Dinge, die man im Voraus wissen sollte (und die ich auf die harte Tour herausfinden musste):
- Stellen Sie sich darauf ein, einiges wieder zerlegen zu müssen, um es beim zweiten Mal richtig zusammenzusetzen.
- Beginnen Sie unten, d. h. an der Grundplatte mit der drehbaren Plattform, und arbeiten Sie sich nach oben vor.
- Das große Lager der rotierenden Basis besteht aus drei Teilen. Ich habe einen leichten Unterschied in der Drehqualität zwischen den beiden möglichen Montagevarianten festgestellt, aber das scheint letztlich keine Rolle zu spielen, da es nur als Totlast fungiert.
- Verwenden Sie zuerst die beiden roten YF-6125MG-Servos. Mein Bausatz enthielt drei davon (einen als Ersatz), aber in der Anleitung und im Video werden sie überall verwendet. Diese Servos sind die stärksten und können das meiste Gewicht tragen – sie sollten daher am unteren Teil des Arms angebracht werden.
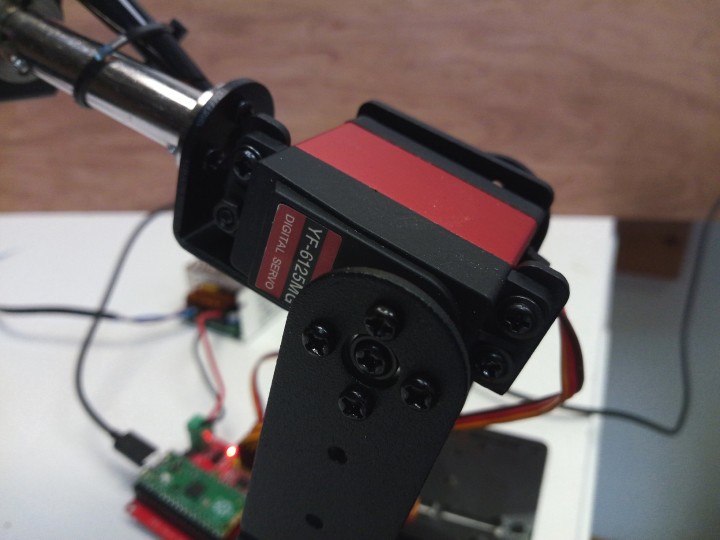
- Vergewissern Sie sich, dass sich alle Servos in ihrer Mittelstellung befinden, bevor Sie sie montieren. Bei den schwarzen MG-996R-Servos können Sie dies manuell/visuell mit einer Art Servozeiger/-arm (im Bausatz enthalten) tun. Die roten YF-6125MG-Servos haben jedoch keine Endanschläge, sodass Sie nicht sehen können, wann sie sich in der Mittelstellung befinden. Daher habe ich den Pico für die Zentrierung der Servos während des Zusammenbaus verwendet. Das hört sich kompliziert an, ist aber eigentlich recht einfach. Ich würde sogar vorschlagen, schon vor der Montage die MicroPython-Entwicklungsumgebung einzurichten und die Demos mit unmontierten Servos auszuführen. Sobald Sie verstehen, wie man die Servos von MicroPython aus steuert, können Sie sie zentrieren und in den Arm einbauen.
- Bei allen Baugruppen wird der Servo zuletzt eingebaut. Er wird im Allgemeinen mit den Schrauben mit der Dichtung (Typ Mexican Hat) befestigt.
- Achten Sie darauf, alle Schrauben fest anzuziehen, denn das ist schwierig, wenn der Arm einmal montiert ist.
- Der vormontierte Greifer wirkte wackelig, daher habe ich die selbstsichernden Muttern etwas angezogen. Das Ergebnis war, dass der Servo, der den Greifer steuert, durchbrannte, da der Greifer offenbar zu schwergängig geworden war (obwohl ich ihn manuell bewegen konnte). Glücklicherweise liegen dem Bausatz zwei Ersatzservos bei.
- Es gibt keinen Schaltplan, es gibt sechs Servos, und die Servoanschlussleiste hat acht Positionen. Glücklicherweise ist sie farblich gekennzeichnet, sodass die richtige Polarität leicht zu finden ist. Schließen Sie die Servos von unten nach oben an. Der unterste Servo (die rotierende Basis, „0“ oder „A“ in der Software) wird an GPIO16 angeschlossen, der oberste (der Greifer, „5“ oder „F“ in der Software) an GPIO21. Die Software erlaubt eine Neuzuordnung der GPIO-Pins und die Drehrichtung jedes Servos kann geändert werden, sodass Sie hier ggf. etwas korrigieren können.
- Die Grundplatte hat viele Löcher, aber keine zur Befestigung der Pico-Platine oder des Netzteils.
- Stellen Sie sicher, dass das Netzteil 5 V liefert, bevor Sie es an den Arm anschließen. Die Ausgangsspannung kann von etwa 4,5 V bis 6,5 V eingestellt werden.
Vorsicht!
Bauen Sie den Roboterarm nicht einfach zusammen und starten Sie die Demo, ohne vorher alle Servos getestet zu haben. Der Arm könnte wild rotieren und um sich schlagen und dabei Gegenstände vom Tisch fegen oder Ihnen ins Gesicht schlagen. Diese Servos sind stark! Ich habe es geschafft, dass der Arm seine eigene 4 mm dicke Grundplatte zerstört hat, weil ein Servo nach unten dagegen schlug, statt nach oben zu gehen. Insbesondere die roten YF-6125MG-Servos bewegen sich ziemlich schnell, also Vorsicht. Ich empfehle dringend, den Arm auf der Werkbank oder einer schweren Platte zu befestigen und den Platz um ihn herum freizuhalten.

Beachten Sie auch, dass die roten YF-6125MG-Servos keine Endanschläge haben und möglicherweise in die falsche Richtung laufen, um ihre Zielposition zu erreichen. Dies kann passieren, wenn der Arm heruntergeklappt ist und dann eingeschaltet wird. Ich empfehle daher dringend, den Arm vor dem Einschalten in die senkrechte Position zu bringen.
Nichts für Anfänger
Der 6 DOF Robot Arm mit Raspberry Pi Pico von Makerfabs ist kein Bausatz für Anfänger. Der richtige Zusammenbau erfordert Geduld und Ausdauer. Obwohl der Arm dank seines in MicroPython geschriebenen Treibers und der Demo recht einfach zu bedienen ist, sollte er Schritt für Schritt gezähmt werden, da sonst Unfälle passieren können. Seine Servos sind schnell und stark, und der vollständig ausgefahrene Arm ist 44 cm lang (50 cm inkl. der Basis).
Es wird dringend empfohlen, den Arm in der Mitte einer freigeräumten Fläche von 1 m² am Boden zu befestigen. Sie wollen doch nicht, dass er Ihren Laptop zerschlägt oder Ihre Kaffeetasse vom Tisch fegt, oder?

Übersetzung: Jörg Starkmuth
Diskussion (0 Kommentare)