Das vernetzte autonome Fahrzeug und seine Umgebung
Ein ingenieurorientierter Leitfaden zu autonomen Fahrzeugen und vernetzten Systemen, der Architekturen, Sicherheitskonzepte sowie das praxisnahe MINI-CAV-Projekt behandelt.
Autonome und vernetzte Fahrzeuge sind längst kein fernes Versprechen mehr. Sie werden dank Fortschritten bei Sensortechnologien, Konnektivität, Elektronik und Software zunehmend Teil des Alltags im Mobilitätsbereich. In The Connected Autonomous Vehicle and Its Environment bietet Jacques Ehrlich einen praxisnahen, ingenieurwissenschaftlichen Leitfaden dafür, wie diese Systeme funktionieren und wie sie unter realen Bedingungen entworfen, getestet und weiterentwickelt werden können.
Das Buch betrachtet autonomes Fahren als integriertes System und geht damit über einzelne Technologien hinaus. Es wird beschrieben, wie Fahrzeuge ihre Umgebung wahrnehmen, Entscheidungen treffen und mit Infrastruktur sowie anderen Verkehrsteilnehmern interagieren, wobei auch die zunehmende Komplexität der Bordelektronik und die Anforderungen an die Sicherheit behandelt werden.
Von Intelligenten Verkehrssystemen zum Ingenieurwesen für Autonome Fahrzeuge
Die einleitenden Kapitel ordnen vernetzte und autonome Fahrzeuge (CAVs) in den Kontext intelligenter Verkehrssysteme (ITS) ein. Zentrale Fachbereiche, Akteure und Referenzarchitekturen werden vorgestellt, gefolgt von einem kompakten historischen Überblick, der die Entwicklung von ersten Forschungsprojekten bis zum heutigen, durch Fahrerassistenzsysteme (ADAS) geprägten Weg hin zu höheren Automatisierungsstufen nachzeichnet.
Die Trajektorienplanung wird als eine der zentralen technischen Herausforderungen des autonomen Fahrens identifiziert. Das Buch unterscheidet dabei klar zwischen operativer, taktischer und strategischer Planung und zeigt, wie Fahrzeugdynamik, Randbedingungen und Echtzeit-Wahrnehmung zusammenwirken müssen, um sichere und zuverlässige Fahrmanöver zu ermöglichen.
Konnektivität wird nicht als Zusatz, sondern als integraler Bestandteil des Systems behandelt. Das Buch erläutert, wie Fahrzeuge Informationen mit der Infrastruktur und untereinander über standardisierte Nachrichten austauschen und wie diese Daten die Sicherheit, den Verkehrsfluss und das Situationsbewusstsein verbessern können. Infrastrukturbezogene Konzepte wie Operational Design Domains (ODD) und Infrastructure Support for Automated Driving (ISAD) werden eingeführt, um realistische Einblicke in Einsatzbedingungen und -grenzen zu geben.
Elektronikarchitekturen und Sicherheitsaspekte
Eingebettete Elektronik macht einen erheblichen Teil der Kosten und Komplexität moderner Fahrzeuge aus; dem Thema wird im Buch daher viel Raum gewidmet. Verteilte Elektronikarchitekturen, Steuergeräte (ECUs), Kommunikationsbusse und Entwurfsmethoden werden anschaulich und strukturiert erläutert – mit Praxisbeispielen und einer ausführlichen Fallstudie.
Sicherheit wird konsequent als Entwurfsanforderung und nicht als abschließende Prüfung behandelt. Die Lesenden werden in die vorläufige Gefährdungsanalyse, Automotive Safety Integrity Levels (ASIL) und Safety of the Intended Functionality (SOTIF) eingeführt, wobei konkrete Beispiele zeigen, wie funktionale Sicherheit und beabsichtigte Funktionalität in der Entwicklung autonomer Fahrzeuge zusammenspielen.
Praktische Ingenieurarbeit am Beispiel des MINI-CAV-Projekts
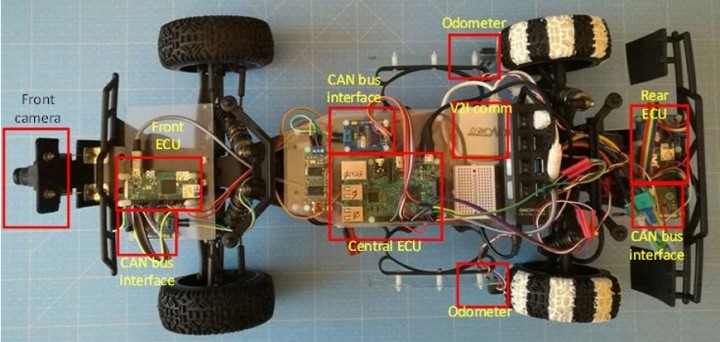
Eines der herausragenden Kapitel des Buchs ist das MINI-CAV-Projekt, ein autonomes Fahrzeug im Maßstab 1:10, das sowohl als Lernplattform als auch als Forschungsträger dient. Statt einer fertigen Lösung regt das Projekt zur eigenständigen Erprobung, Zusammenarbeit und schrittweisen Entwicklung an. MINI-CAV, vollständig ausgestattet mit Sensoren, Aktoren und verteilter Bordelektronik.
Das Fahrzeug fährt auf einer speziell eingerichteten Teststrecke mit Fahrbahnmarkierungen und Hindernissen. Eine Reihe von Anwendungsfällen steigert die Komplexität schrittweise, beginnend mit einfachem Spurhalten bis hin zu Hinderniserkennung, Geschwindigkeitsanpassung und durch Infrastrukturkommandos ausgelöste Spurwechsel.
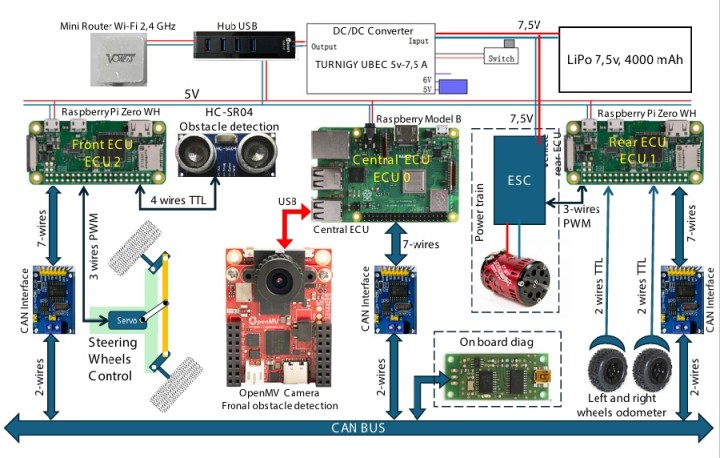
MINI-CAV dient zudem als praktische Plattform, um reale ingenieurtechnische Zielkonflikte zu erforschen – etwa bei der Sensorplatzierung, Stromverteilung, Aufgabenverteilung auf mehrere Steuergeräte und Kommunikationsstrategien. Technische Architektur des MINI-CAV: Mehrere auf Raspberry Pi basierende Steuergeräte, vernetzt per CAN-Bus und WLAN.
Vom Experiment zur Systemverständnis
Indem theoretische Grundlagen, Praxisbezug und ein umfangreiches Hands-on-Projekt kombiniert werden, vermittelt The Connected Autonomous Vehicle and Its Environment ein realistisches Bild davon, was für die Entwicklung und den Bau autonomer Fahrzeugsysteme erforderlich ist. Das Buch richtet sich an Ingenieure, fortgeschrittene Studierende und technisch versierte Lesende, die über Einzelkomponenten hinaus das autonome Fahren als komplettes, vernetztes System verstehen möchten.
Für alle, die sich für autonome Systeme, eingebettete Elektronik und die Zukunft der vernetzten Mobilität interessieren, bietet das Buch sowohl eine solide technische Grundlage als auch einen praxisnahen Einstieg in Experimente und Systemdenken.
Das Elektor Magazine gehört seit 65 Jahren zu den führenden Informationsquellen für Elektronikingenieure, Entwickler, Start-ups und Unternehmen. Unser Magazin wird von einer aktiven Community aus Elektronikingenieuren – von Studenten bis zu Profis – getragen, die mit Leidenschaft innovative Ideen entwickeln und teilen.
Für diese veröffentlichen wir jedes Jahr Hunderte von Beiträgen in Formaten wie Artikeln, Videos, Webinaren und weiteren Lernformaten. Unsere Mission ist es, Wissen auf jede mögliche Weise zu teilen und die Leser mit den neuesten Entwicklungen im Bereich der Elektrotechnik zu inspirieren.
Vielen Dank für Ihre Bewertung!
Kommentar hinzufügen
Vielen Dank für Ihre Bewertung!
Möchten Sie einen Kommentar mit Ihrer Bewertung hinterlassen? Bitte melden Sie sich unten an. Nicht gewünscht? Dann schließen Sie einfach dieses Fenster.



Diskussion (0 Kommentare)