
Autonome Autos nur mit GPS und Kameras?
27. Mai 2019
über
über
Verbesserte Algorithmen machen es möglich: Autonome Autos können sich lediglich mit Kamera und GPS (und Karten) auch in unbekanntem Terrain orientieren. Forscher des MIT (Massachusetts Institute of Technology) haben eine Software entwickelt, durch die Autos ähnlich wie Menschen lernen, die richtige Strecke zu finden.
Mit dieser Software muss das Auto nicht mehr in neuem Gelände vorher trainieren. Es reicht passendes Kartenmaterial, damit sich das Fahrzeug auch auf bisher unbekannten Straßen zurecht findet.
Um die Software anzulernen, steuert ein menschlicher Fahrer das autonome Fahrzeug durch einen Stadtteil. Die Software lernt dabei von den erhobenen Daten das Fahrverhalten bei bestimmten Verkehrsverläufen und Hindernissen. Anschließend konnte das Auto problemlos einen bestimmten Weg durch ein anderes, bewaldetes Gebiet einschlagen und bewältigen.
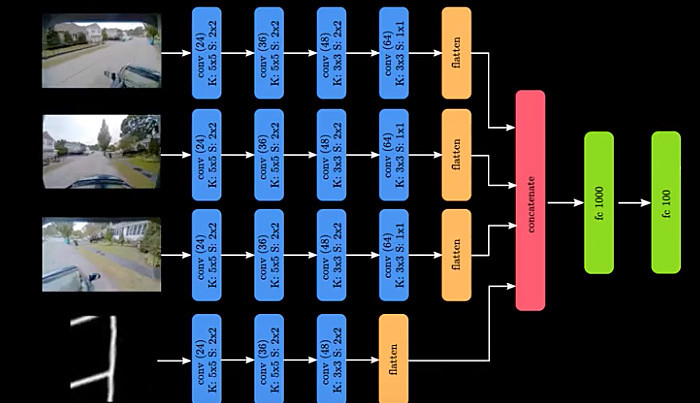
Autonome Beispielfahrt „End-to-End“. Video: MIT /Amini
Die Software basiert auf dem anspruchsvollen „End-to-End“-Prinzip, bei dem sensorische Daten direkt auf das Fahrverhalten übertragen werden. Bislang war auf dieses Prinzip setzende Lösungen nur dazu in der Lage, ein Auto den aktuellen Straßenverlauf zu führen und eben nicht von einem bestimmten Startpunkt zu einem bestimmten Ziel. Autonome Autos lernen mit der neuen Software das richtige Verhalten bei Kreuzungen, Abzweigungen und Kreisverkehren. Die erhobenen Daten nutzt die Software nicht nur zur Erkennung von Stoppschildern etc., sondern auch anhand der Fahrbahnmarkierungen zu bemerken, dass es sich einer Kreuzung nähert.
Es kann sogar noch bei Inkonsistenzen zwischen Straßenverlauf und Kartendaten noch sicher fahren: Suggeriert die Karte beispielsweise ein notwendiges Rechtsabbiegen, aber die Straße geht immer noch geradeaus, wird weitergefahren und erst die nächste Möglichkeit zum Abbiegen genutzt etc. In der realen Welt liefern Sensoren keine fehlerfreien oder eindeutigen Daten. Die Software ist dazu ausgelegt, mit solchem „Rauschen“ umzugehen und dennoch sicher zu fahren bzw. sich selbst in der Umgebung zurecht zu finden.
Mit dieser Software muss das Auto nicht mehr in neuem Gelände vorher trainieren. Es reicht passendes Kartenmaterial, damit sich das Fahrzeug auch auf bisher unbekannten Straßen zurecht findet.
Autonomes Navigieren
Laut den Forschern haben Menschen gegenüber autonomen Autos dank ihrer Intelligenz einen großen Vorteil bei der Orientierung im Straßenverkehr: Menschen reichen ihre Sinneseindrücke von der Umgebung. Ein autonomes Auto hingegen muss neue Gegenden auf zeitraubende Weise zunächst intern kartieren und analysieren. Mit der neuen Software des MIT kann nun auch eine Maschine wie das Auto das Fahr- und Orientierungsverhalten von Menschen imitieren. Hierzu sind dann außer einer Kamera nur GPS-Daten und einfache Straßenkarten vonnöten.Um die Software anzulernen, steuert ein menschlicher Fahrer das autonome Fahrzeug durch einen Stadtteil. Die Software lernt dabei von den erhobenen Daten das Fahrverhalten bei bestimmten Verkehrsverläufen und Hindernissen. Anschließend konnte das Auto problemlos einen bestimmten Weg durch ein anderes, bewaldetes Gebiet einschlagen und bewältigen.
Geringe Datenmengen
Die für diese Lösung erforderlichen Karten benötigen relativ wenig Speicherplatz. Bislang benötigen autonome Fahrlösungen zusätzliche Informationen etwa von LIDAR-Sensoren, um damit extrem aufwändige Karten zu erstellen. Schon zur Kartografierung von San Francisco alleine fallen schon 4 TB Daten an. Die MIT-Software hingegen kommt hier für alle Länder der Welt auf einen Speicherbedarf von lediglich 40 GB – ähnlich wie die Karten moderner Navigationssysteme für menschliche Anwendungen. Die Software kann sich alleine durch ihre Kameras an Hindernisse anpassen, die nicht auf der Karte verzeichnet sind. Sie erkennt dabei, wo genau es sich auf der Straße befindet.Die Software basiert auf dem anspruchsvollen „End-to-End“-Prinzip, bei dem sensorische Daten direkt auf das Fahrverhalten übertragen werden. Bislang war auf dieses Prinzip setzende Lösungen nur dazu in der Lage, ein Auto den aktuellen Straßenverlauf zu führen und eben nicht von einem bestimmten Startpunkt zu einem bestimmten Ziel. Autonome Autos lernen mit der neuen Software das richtige Verhalten bei Kreuzungen, Abzweigungen und Kreisverkehren. Die erhobenen Daten nutzt die Software nicht nur zur Erkennung von Stoppschildern etc., sondern auch anhand der Fahrbahnmarkierungen zu bemerken, dass es sich einer Kreuzung nähert.
Es kann sogar noch bei Inkonsistenzen zwischen Straßenverlauf und Kartendaten noch sicher fahren: Suggeriert die Karte beispielsweise ein notwendiges Rechtsabbiegen, aber die Straße geht immer noch geradeaus, wird weitergefahren und erst die nächste Möglichkeit zum Abbiegen genutzt etc. In der realen Welt liefern Sensoren keine fehlerfreien oder eindeutigen Daten. Die Software ist dazu ausgelegt, mit solchem „Rauschen“ umzugehen und dennoch sicher zu fahren bzw. sich selbst in der Umgebung zurecht zu finden.
Mehr anzeigen
Weniger anzeigen
Diskussion (0 Kommentare)