
Tankfüllstandsregelung: ein zweistufiger Regler mit Hysterese
über
Dieser Brunnen- und Wassertank-Füllstandsregler ist für den Einsatz unter rauen Bedingungen vorgesehen, da diese nicht immer für empfindliche Elektronik geeignet sind. Die hier vorgeschlagene Logikschaltung verfügt über die, für diesen Zweck geeigneten Eigenschaften an Einfachheit und Robustheit. Darüber hinaus ermöglicht sie mit einer Zwei-Schwimmer-Schaltung eine "hydraulische Hysterese"-Funktion.
Wenn Sie ein Wassersystem versorgen müssen, ist es ideal, wenn Sie über eine Wasserleitung verfügen, deren Druck und Durchflussmenge für Ihren Bedarf ausreichend sind. Kompliziert wird es, wenn sie sich in einem Gebiet befinden, das nicht an eine Wasserversorgung angeschlossen ist oder wenn der hohe Verbrauch und die Nutzung derselben Wasserquelle eine Versorgung aus einem Aquädukt nicht ratsam machen oder verhindern. In diesem Fall besteht die Lösung oft darin, auf Brunnen oder Speicherbecken zurückzugreifen, aus denen das notwendige Wasser mittels Hebepumpen entnommen werden kann. Das ist der Fall, den wir hier beleuchten wollen. Eine Infrastruktur für die Wassergewinnung und -speicherung besteht aus Elementen, die mit erheblichen Kosten verbunden sind. Dazu gehören nicht nur die Anschaffung und Wartung, sondern auch die Energiekosten, die für den Betrieb erforderlich sind.
Ein wirksames Betreiben sollte daher darauf abzielen, die Nutzung der Anlagen zu optimieren, ihren Verschleiß und Energieverbrauch zu verringern, um das Auftreten von Störungen zu begrenzen, die zudem zu schwerwiegenden Schäden führen könnten. Anlagen dieser Art weisen in der Regel einen Automatisierungsgrad auf, der nicht besonders groß ist. Dies gilt insbesondere für die Pumpen- und Durchflussüberwachung.
In den meisten Fällen bieten ältere Installationen nur wenige Überwachungsmöglichkeiten. Aus Sensorsicht umfassen die gebräuchlichsten Lösungen einen Druckschalter (mechanisch oder elektronisch) und einen Schwimmerschalter. Diese Schaltung sind sehr erfolgreich, da ihr einfaches und robustes Design die Wahrscheinlichkeit eines Ausfalls verringert und ihre Reparatur im Falle eines Ausfalls vereinfacht.
Um das Design dieser Steuerungssysteme einfach zu halten, ist es besser, mikrocontroller, Einplatinencomputer oder andere übermäßig komplizierte Lösungen auszuschließen, die zwar für die Entwickler sehr stimulierend sind, aber im Falle von Ausfallzeiten eine entscheidende Diagnose erschweren. Darüber hinaus muss das Design auf leicht verfügbaren Komponenten basieren und die Änderungen, die für die Installation im jeweiligen System vorgenommen werden müssen, vereinfachen.
Das Design
Die Lösung, die sich aus diesen Überlegungen ergab, ist eine Steuereinheit, die zwei Schwimmer enthält und nur den Anschluss einiger Leitungen erfordert. Die Einstellung der Betriebszeit der Pumpe wird durch Setzen eines DIP-Schalters ermöglicht. Aus Sicht der Schaltungsauswahl wurde eine Logik mit drei CMOS-ICs (von denen zwei identisch sind), die auf einem Sockel montiert sind, gewählt, um Reparaturarbeiten zu erleichtern, die nur mit Handwerkzeugen und ohne den Einsatz von PCs und Software-Tools durchzuführen sind.
Das Gerät ist unterteilt in einen Teil, der mit 240 VAC arbeitet und den Pumpenbetrieb steuert, und einen weiteren, der mit Niederspannung (12 VDC) arbeitet. Der 240-V-Wechselstromteil ist mit einem Erdungsstromkreis ausgestattet, der mit der Masse des elektrischen Systems verbunden werden muss, um einen ausreichenden Schutz zu gewährleisten.
Der Niederspannungskreis ist durch ein doppelt isoliertes, zertifiziertes Stromversorgungsmodul vom 240 VAC-Netz und dem Erdstromkreis getrennt. Dies bewirkt, dass wir auf unserer Leiterplatte eine Massefläche in der Nähe der Leiterbahnen haben, die die 240 VAC verarbeiten, und getrennt davon, eine Massefläche, die die Logik- und Niederspannungsteile umgibt. Diese sind voneinander isoliert und dürfen niemals miteinander verbunden werden!
Die Regelung der Füllzeit erfordert die Einführung eines Watchdogs (Schutztimer), der die Dauer des Füllzyklus überwacht und bei Überschreitung der maximalen Zeit die Pumpe abschaltet. Die maximale Zeit wird, wie bereits erwähnt, über einen DIP-Schalter eingestellt und sollte etwas länger als die durchschnittliche Füllzeit gewählt werden. Wenn sich der Tank nicht in der eingestellten Zeit gefüllt hat, liegt wahrscheinlich ein Leck vor oder es liegen Bedingungen vor, die den Durchfluss einschränken und dazu führen können, dass die Pumpe an der Grenze ihrer Möglichkeiten arbeitet oder im schlimmsten Fall ohne Wasser läuft. Das Stoppen der Pumpe nach einer bestimmten Zeit reduziert die Wasserverschwendung bei einem Leck oder verringert die Wahrscheinlichkeit eines Pumpenschadens in anderen Fällen.
4 LEDs zeigen den Betriebszustand an. Zusätzlich verfügt das Steuergerät über einen Taster, dessen Druck das Einschalten der Pumpe bewirkt. Diese Funktion dient hauptsächlich dazu, den korrekten Betrieb der Pumpe zu testen und übersteuert die Sperrlogik des Steuergeräts.
Funktionsprinzipien
Wie erwartet, besteht einer der Vorteile darin, die Anzahl der Pumpenumdrehungen zu reduzieren und die Betriebszyklen zu maximieren. Um diesen Vorteil zu erreichen, haben wir uns für die Installation von zwei Schwimmern entschieden, die uns anzeigen, wann der Wasserstand sein Maximum erreicht hat und wann er auf das für den Betrieb erforderliche Minimum gesunken ist.
Je größer der Abstand zwischen Minimum und Maximum ist, desto größer ist die nachzufüllende Wassermenge und desto weniger Füllzyklen. Durch das Einsetzen von zwei Schwimmern, anstatt nur einem, können wir die Auslösepunkte der beiden Schwellen einfach einstellen, wodurch ein echter "hydraulischer Schmitt-Trigger" entsteht.
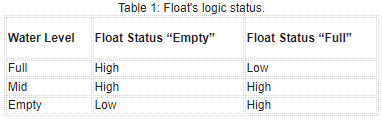
Wir arbeiten mit zwei Signalen FULL (Voll) und EMPTY (Leer), die von unserem Tank kommen und die Zustände, wie in Tabelle 1 beschrieben, annehmen. Wenn der Zustand des leeren Tanks überprüft wird, schaltet die Logik die Pumpe ein und startet den Watchdog. Wenn innerhalb der eingestellten Zeit ein Volltanksignal ausgelesen wird, wird die Pumpe gestoppt und der Watchdog zurückgesetzt. Andernfalls wird die Pumpe durch das Eingreifen
des Watchdogs gestoppt und die Alarm-LED leuchtet auf. Der Alarm wird automatisch zurückgesetzt, wenn der Zustand "Tank leer" wieder erreicht ist.
Die Schaltung
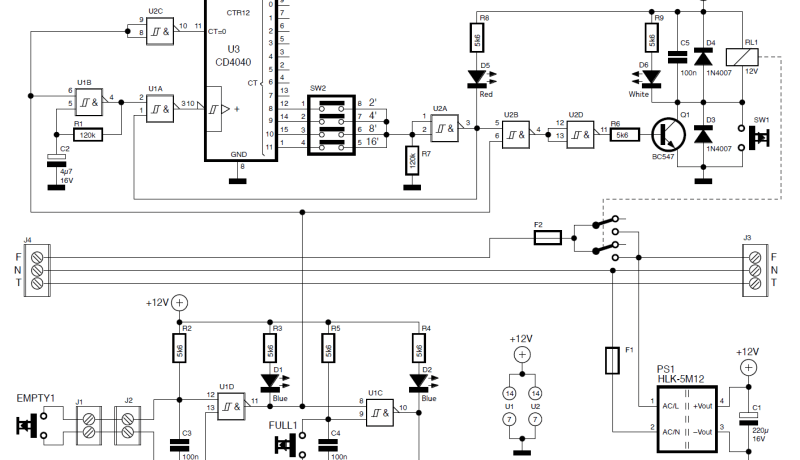
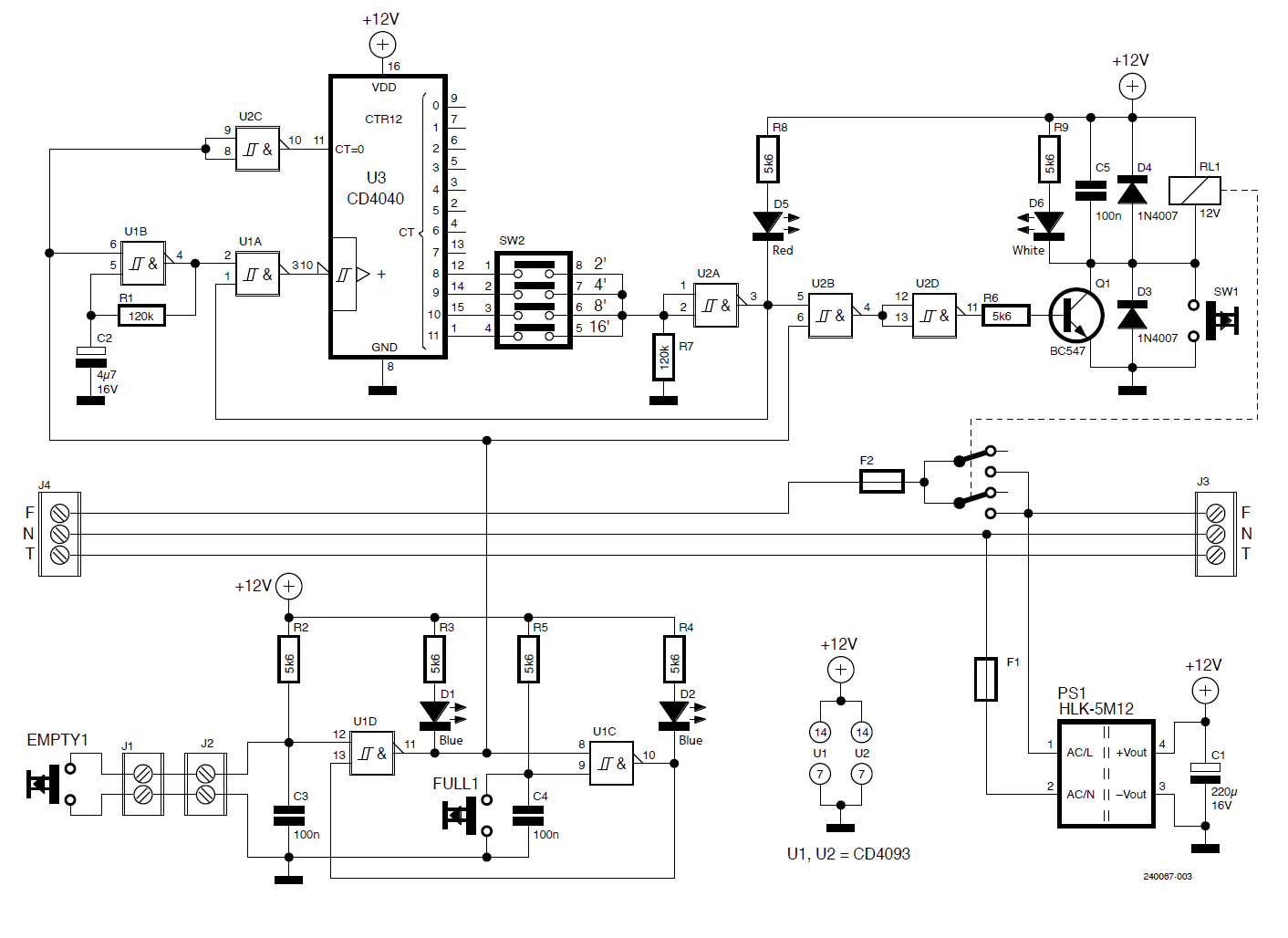
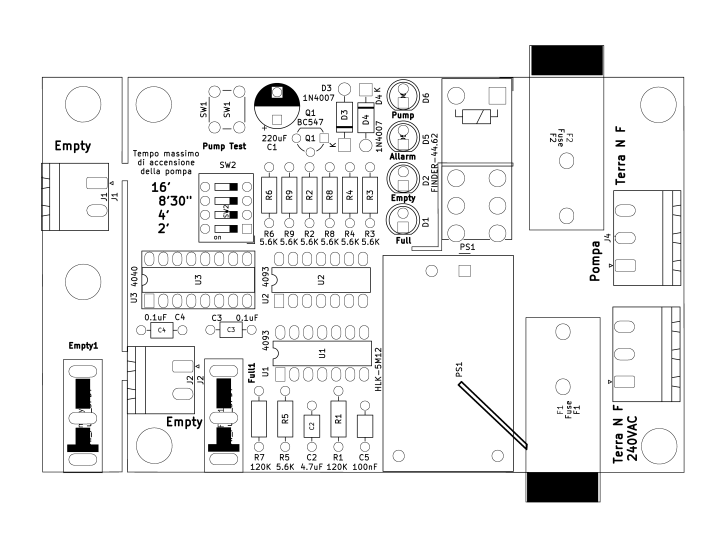
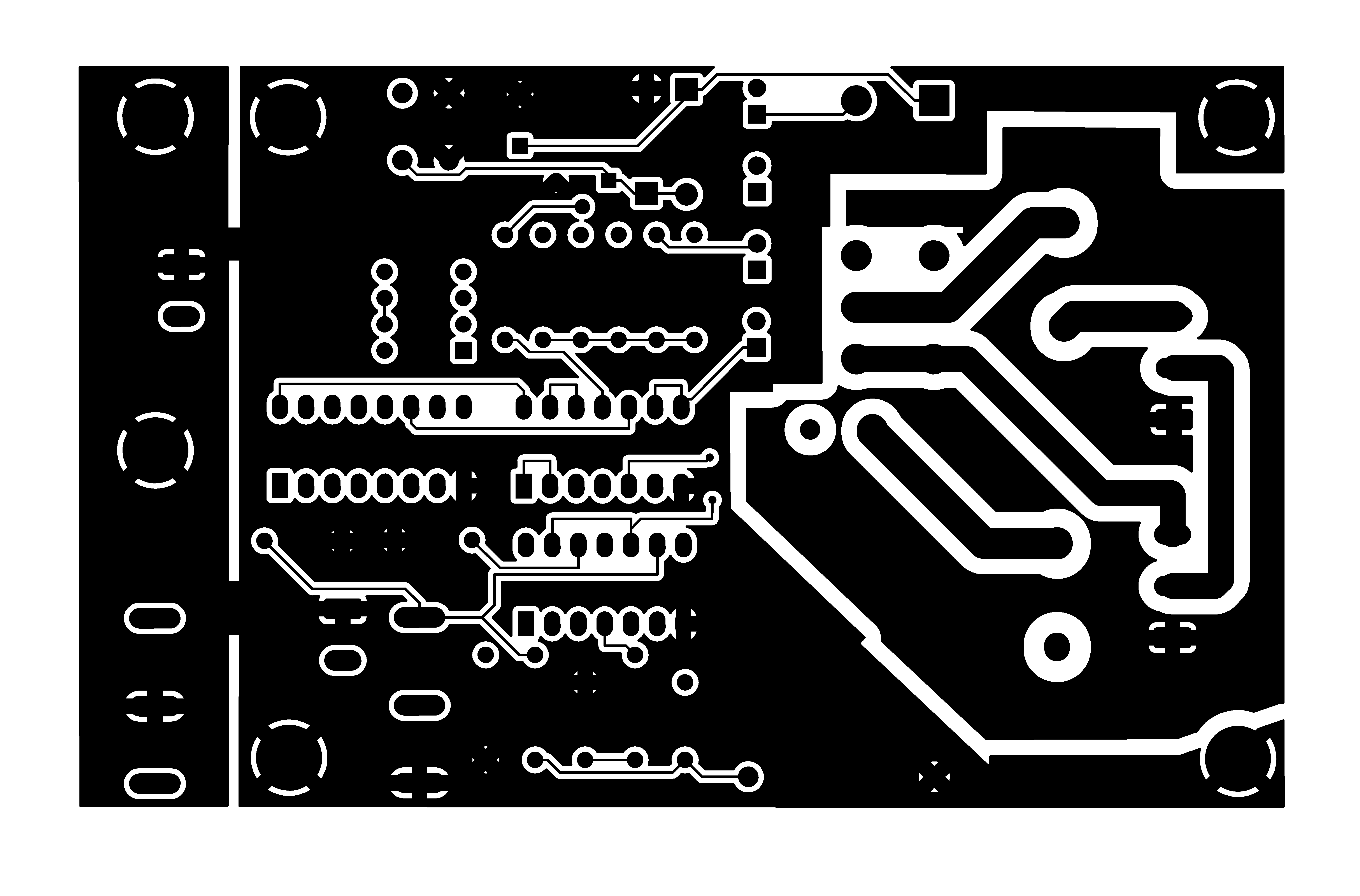
Die Schaltung (Bild 1) besteht aus fünf Blöcken: Spannungsversorgung (Betrieb mit 240 VAC), 12-VDC-Spannungsversorgung, Füllstandssensoren (Schwimmer), Eingangsspeicher, Pumpensteuerung und Watchdog. Die Spannungsversorgung umfasst die 240-VAC-Eingangsklemme, die Schutzsicherungen für die Pumpe und die 12-VDC-Versorgung, den Relaiskontaktteil und die Anschlussklemme für den Pumpenanschluss.
Die Leiterbahnen, die sich auf die Verbindungen zwischen den Klemmenblöcken und den Relaiskontakten beziehen, sind alle doppelt ausgelegt (obere und untere Lage), damit sie hohen Strömen standhalten können. Das 12-VDC-Netzteil ist abgedichtet, so dass wir sicher sein können, dass wir die Voraussetzungen für die Zertifizierung der doppelten Isolierung und die Mindestanforderungen für den Stromversorgungsteil dieser Geräteklasse erfüllt haben.
Unser Netzteil ist in der Lage 5 W zu liefern, so dass wir ohne zeitliche Begrenzung einen maximalen Strom von 450 mA am Ausgang ziehen konnten. Der Ausgang ist gegen Überlastung geschützt. Hinsichtlich der Wärmeabgabe durch das Netzteil besteht kein Handlungsbedarf, da das Modul durch seine Wände die Verlustleistung abgibt. Ein 220 μF Kondensator wurde eingesetzt, um eine gute Stabilisierung der 12 VDC zu gewährleisten. Die Füllstandssensoren bestehen aus zwei Mikroschaltern, von denen einer auf der Hauptplatine installiert ist, während der andere auf einer kleinen Leiterplatte montiert und über zwei Klemmenblöcke und ein paar Leitungen mit der Hauptplatine verbunden ist (die Verbindung ist nicht polarisiert). Die beiden Mikroschalter werden mit einer dünnen Schnur mit zwei Schwimmern verbunden. Um vorzeitigen Verschleiß oder Bruch zu vermeiden, sollte die Schnur aus einem Material bestehen, das gegen Wasser, Feuchtigkeit und den Befall durch Schimmel oder Mehltau beständig ist. Bei unseren Implementierungen haben wir uns für 1 mm Polyesterschnur entschieden, die normalerweise im Bootssport verwendet wird.
Die Schwimmer müssen ein ausreichendes Gewicht haben, um die Mikroschalter auszulösen, dürfen sie aber nicht beschädigen. Wir haben Hartplastikschwimmer mit einem Durchmesser von 80 mm verwendet, die mit Gewinden ausgestattet sind, sowohl im oberen Teil, wo wir die Schnur befestigt haben, als auch im unteren Teil, wo wir eine Schraube mit 3 Edelstahlmuttern platziert haben, um die Masse des Schwimmers leicht zu erhöhen und einen reibungslosen Betrieb des Systems zu gewährleisten.
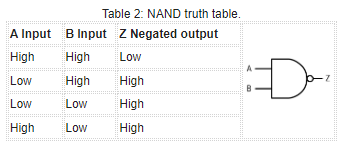
Der Eingangsspeicher besteht aus einem bistabilen Flipflop (U1D und U1C), das das Signal direkt von den Mikroschaltern empfängt, die mit den beiden Schwimmern verbunden sind. Die Eingänge werden über zwei 5,6 kΩ Pull-up-Widerstände auf +12 V bezogen, während zwei 100 nF Kondensatoren als Rauschunterdrücker gegen Masse fungieren. Die NAND-Logik ist prioritätsempfindlich gegenüber der Logikebene Low, wie in Tabelle 2 zu sehen ist.
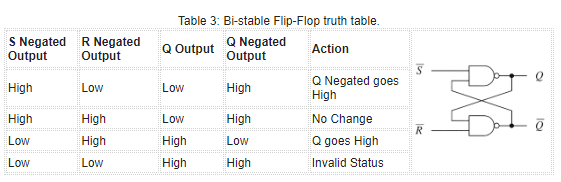
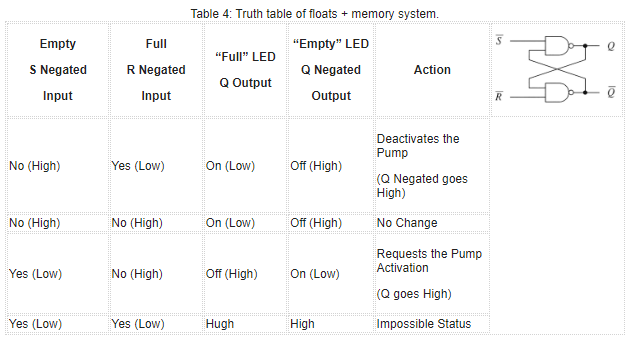
Dies bewirkt, dass die Zustandsänderung unseres Flipflops gemäß Tabelle 3 erfolgt. Wenn wir an den Negierten-S-Eingang den Empty (Tank Leer) Schwimmer und an den Negierten-R-Eingang den Full (Tank voll) Schwimmer und an den Negierten-Q-Ausgang die LED anschließen, die den Tank Full-Status (Full LED) signalisiert, während wir an den Negierten-Q-Ausgang die LED anschließen, die den Tank-Empty-Status signalisiert (Empty LED), haben wir das, was in Tabelle 4 gezeigt wird.
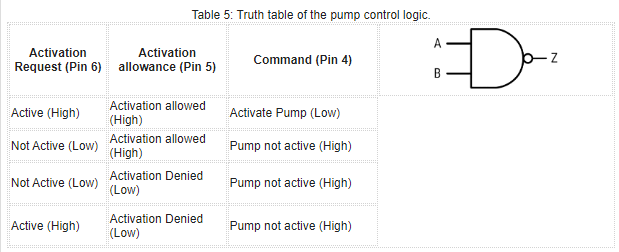
Die Pumpensteuerung wird mit NAND-Logik (U2B) realisiert, der die Einschaltanforderung aus dem Speicher (Pin 6) empfängt und mit der Einschaltfreigabe des Watchdogs (Pin 5) vergleicht. Die Wahrheitstabelle für diese Schaltung ist in Tabelle 5 dargestellt.
Das Ausgangssignal der NAND-Logik wird invertiert und zur Steuerung des Transistors verwendet, der das Pumpen-Einschaltrelais aktiviert. Ein Taster (SW1) wurde parallel zum Transistor geschaltet, der die Relaisspule steuert. Wenn er gedrückt wird, bewirkt er die Aktivierung des Relais unter Umgehung aller Schaltkreise und Logik. Diese Anordnung stellt sicher, dass der ordnungsgemäße Betrieb des Leistungsteils der Pumpe und der Niederspannungsversorgung überprüft werden kann. In diesem Zustand sollte die PUMP-LED leuchten.
Wie erwartet, bietet das Steuergerät Schutz auf die maximale Laufzeit der Pumpe (Watchdog). Dieser Schutz erfolgt mit einem Taktgenerator (U1B), einem Zähler (U3), dem Schutzzeitwähler (SW2) und einer Handvoll Steuerlogik, die alle durch das vom Speicher erzeugte Einschaltsignal für die Pumpe getriggert werden.
Wenn der Speicher das Einschalten der Pumpe anfordert, entsperrt er gleichzeitig den Watchdog-Zähler (U3) über U2C und startet den Taktgenerator (U1B Pin 6). In diesem Modus startet der Zähler. U3 ist ein 12-stufiger binärer Zähler, d.h. ein IC, das einen Takt durch 2 bis zu 4096, gemäß dem Exponenten von 2, teilen kann. Wir lassen die ersten Ausgabepins weg, da sie für unsere Zwecke zu schnell sind, und betrachten nur die letzten 4 (geteilt durch 512, 1024, 2048, 4096).
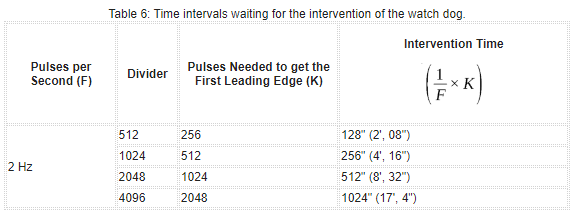
Zum Anhalten der Pumpe wird die positive Flanke verwendet, d. h. diejenige, die der Zähler erzeugt, wenn er die Hälfte der Impulse erreicht hat, die für die Vervollständigung des Zyklus durch den gegebenen Teilungsfaktor erforderlich sind. Die zum Anhalten der Pumpe erforderlichen Impulse sind also 256, 512, 1024, 2048. Ausgehend von einem Takt von etwa 2 Hz ergeben sich, die in Tabelle 6 angegebenen Auslösezeiten für den Watchdog.
Der Wahlschalter SW2 verbindet einen der vier Ausgänge mit der NAND-Logik U2A, die den Ausgang des Zählers invertiert, so dass vor dem Auslösen des Watchdogs ein High-Pegel und bei Ablauf der Wartezeit ein Low-Pegel vorliegt. Der Eingang von U2A ist mit einem Pull-Down verbunden, der für einen niedrigen Pegel sorgt, falls Sie den Watchdog deaktivieren möchten (die vier Schalter von SW2 stehen alle auf Aus).
Zusätzlich zur Steuerung des Pumpeneinschaltkreises schaltet der Ausgang von U2A die Alarm-LED ein und zeigt an, dass eine Pumpensperre aufgrund des Auslösens des Wachdogs aufgetreten ist. Der Ausgang von U2A, der auf Low geht, zwingt den Ausgang von U2B auf High, wodurch sich das Relais öffnet (Pumpe angehalten) und gleichzeitig das Taktsignal (U1A) stoppt. Dadurch wird verhindert, dass der Zähler mit der Zeit weiterläuft und seinen Zustand ändert. Die gesamte Watchdog-Kette kehrt in den Ausgangszustand zurück, wenn das Signal für einen niedrigen Reservoirstand wieder hochkommt.
Wenn Sie andere Watchdog-Reaktionszeiten als die derzeit verfügbaren benötigen, können Sie den Takt ändern, um die für Ihre Installation nützlichen Zeiten zu erhalten. Der neue Takt wird mit der folgenden Formel berechnet:
tClock = t/1024
Dabei ist t die Wartezeit in Sekunden und tClock die Periode. Sobald Sie die Periode des neuen Takts erhalten haben, berechnen Sie den neuen Wert von R1 mit der folgenden Formel:
R1 = (tClock/0.7767840746)/0.0000047
Der berechnete Wert sollte durch den nächstgelegenen handelsüblichen Wert ersetzt werden (z. B. 136 kΩ mit 120 kΩ), und bei der Auswahl sollten auch Bauteiltoleranzen berücksichtigt werden, die insbesondere bei Kondensatoren sehr oft bis zu ±20 % betragen können. Der berechnete Wert entspricht dem Schalter 3 des Wahlschalters SW2, d.h. dem derzeitigen Teiler 512"; Auf diese Weise haben Sie weitere Wahlmöglichkeiten, die von einem Viertel T bis zu einem doppelten T reichen.
Leistungsrelais und maximaler Laststrom
Die Last wird von einem Relais der Serie Finder 44.62 gesteuert. Diese Relais können Doppel- oder Einzelkontakte haben, aber in jedem Fall beträgt der maximale Strom, den sie verarbeiten können, 16 A mit ohmschen Lasten. Da es sich bei der Pumpe um eine induktive Last handelt, muss dieser Strom entsprechend dem Phasenverschiebungswinkel zwischen Strom und Spannung (cosφ) reduziert werden. Jede Pumpe hat ihre eigene charakteristische cosφ Verschiebung, die auch je nach Lastbedingungen variieren kann, so dass wir vorsichtshalber einen cosφ = 0,6 annehmen und, unter Berücksichtigung der vom Finder bereitgestellten Tabellen, eine Korrekturkonstante für den maximal handhabbaren Strom von 0,8 ableiten. Multipliziert man den Nennstrom mit diesem Faktor, erhält man 16 A × 0,8 = 12,8 A.
Um die Sicherheitsmarge weiter zu erhöhen, sollten wir einen maximalen Grenzwert von 10 A festlegen. Gibt es besondere oder ungewöhnliche Bedingungen, z.B. kann es notwendig sein, Pumpen zu steuern, die einen Strom von mehr als 10 A ziehen, oder die Pumpe verursacht Funken an den Relaiskontakten oder Pumpen, die mit einer dreiphasigen Stromversorgung arbeiten, dann ist es möglich, an unsere Steuereinheit ein geeignetes Schütz mit ausreichender Leistung für unsere Bedürfnisse anzuschließen. Die Erregerspule, die mit 240 VAC arbeitet, stellt somit die Last des Steuergeräts dar, während der tatsächliche, höhere Laststrom der Pumpe durch die Hochstromkontakte des Schützes geschaltet wird.
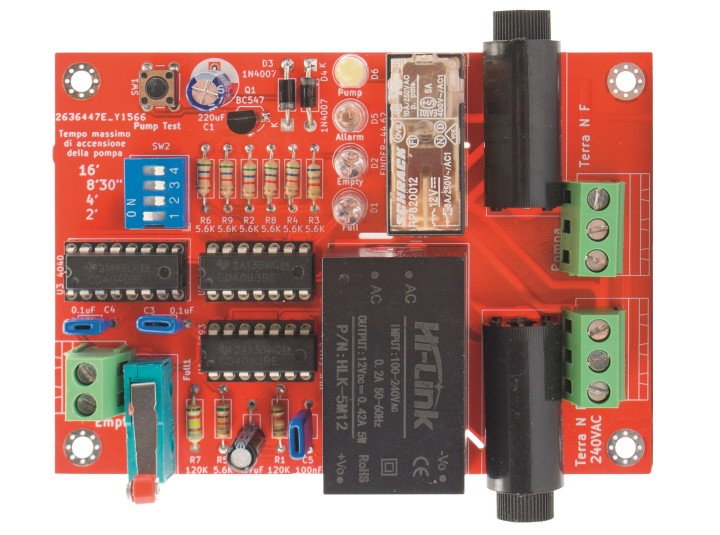
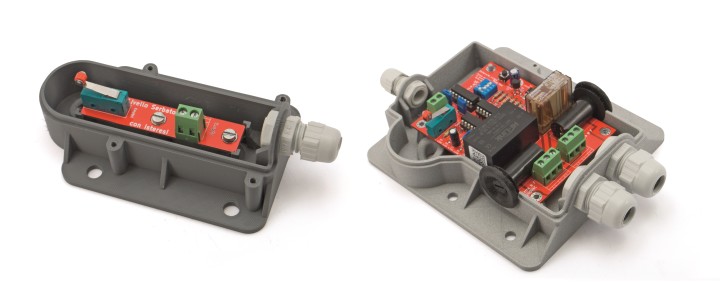
Praktische Umsetzung
Was die Konstruktion betrifft, so könnte durch unsaubere Montage ein Schwachpunkt entstehen, welcher kritische Bedingungen zwischen den an die Netzspannung angeschlossenen Leiterbahnen und der Masse oder anderen Schaltungsteilen schaffen könnte. So ist es erforderlich ist, ein gratfreies Löten durchzuführen und am Ende möglicherweise Flussmittelrückstände mit einer guten Wäsche in Isopropylalkohol (Leiterplatten-Reinigungsdosen sind ausreichend) und einer Drahtbürste beseitigt werden.
Für die Wärmeableitung müssen keine Vorkehrungen getroffen werden, da es keine Komponenten gibt, die sich erwärmen, so dass Widerstände, Dioden, Elektrolytkondensatoren und Stromversorgungsmodule in Kontakt mit der Leiterplatte montiert werden können. Bei Sicherungshaltern, Klemmenblöcken und Mikroschaltern erhöht die feste Montage auf der Leiterplatte ihre Widerstandsfähigkeit gegen mechanische Beanspruchung während des Gebrauchs. Was die Montage von sechs hohen Komponenten betrifft, so löten Sie zuerst die niedrigen Komponenten und dann die höheren Komponenten nach und nach: So können Sie schneller und einfacher mit der Montage fortfahren.
Positionierung der Schwimmer
Wie bereits erwähnt, sind die Schwimmer mit den Mikroschaltern über eine dünne Schnur verbunden, deren Länge von der Größe des Tanks und der beabsichtigten Füllstandsänderung des Wassers zwischen dem Auslösepunkt der Pumpe und dem maximalen Füllstand abhängt. Bei der Wahl des Ortes, an dem wir unsere Schwimmer platzieren, müssen wir sicherstellen, dass sich die Schnüre nicht verdrehen können. Zudem müssen wir auch die Art und Weise berücksichtigen, wie das Wasser in den Tank gelangt, da es vorkommen kann, dass die Schnüre oder Schwimmer durch den Wasserfluss oder die Turbulenzen, die beim Eintritt in den Tank entstehen, beeinträchtigt werden und ihren Betrieb verändern. Um die Positionierung zu erleichtern, haben wir einen Mikroschalter auf der Hauptplatte und den anderen auf einer kleinen Platine montiert, die eine einfache, unterschiedliche Neupositionierung ermöglicht, wenn Probleme auftreten.
Verdrahtung
Unsere Basisplatine benötigt drei Leitungen, eine für den Remote-Schwimmer, eine für die Stromversorgung und eine für die Pumpe. Die Leitung, die die entfernte Schwimmer-Platine verbindet, ist zweiadrig und hat keine Querschnittsanforderungen. Wenn man bedenkt, dass sie mit 12 V arbeitet und 0,002 A führt, ist jede Lösung mit zwei isolierten Drähten geeignet. Das Stromversorgungskabel muss aus drei Adern bestehen (Stromführend, Neutral, Erdung) mit einem Querschnitt von mindestens 1,5 mm², um dem Pumpenstrom standzuhalten, der, wie bereits erwähnt, 10 A nicht überschreiten sollte. Gleiches gilt für das Kabel, das die Pumpe versorgt. Bitte beachten Sie, dass in Installationen, die mit 230 VAC betrieben werden, Adern mit einem Durchmesser von weniger als 1,5 mm² nicht zulässig sind.
Kalibrierung
Sobald die Montage, die Positionierung der Schwimmer und die Verkabelung abgeschlossen sind, können wir mit der Kalibrierung unseres Geräts fortfahren. Der erste Schritt besteht darin, die Länge der Schnüre anzupassen, die die Schwimmer tragen. Nachdem wir die Schwimmer angeordnet haben, gehen wir wie folgt vor:
- Alle Schalter des Wahlschalters SW2 sollten auf Aus stehen. Dies führt dazu, dass der Watchdog ausgeschalten wird.
- Lassen Sie den Wasserstand sinken, bis der Schwimmer des leeren Tanks auslöst (die EMPTY LED leuchtet auf und das Relais befiehlt der Pumpe, sich einzuschalten)
- Messen Sie die Füllzeit, d.h. die Zeit, für die die Steuerung, die Pumpe am Laufen hält.
- Wählen Sie den Einstellschalter SW2 entsprechend, der der Zeit unmittelbar der Füllzeit entspricht, und stellen Sie ihn auf ON.
- Falls die Füllzeit länger als 17 Minuten ist, muss der Takt verändert werden.
Tankfüllstandskontrolle
Dieses Design stellt eine Lösung im Bereich der Wasserautomatisierung dar, die den Energieverbrauch optimiert und den Verschleiß der Pumpen minimiert, während sie gleichzeitig eine praktische und zuverlässige Lösung für Bereiche ohne Leitungsanschlüsse oder in Bereichen bietet, in denen die Wasserversorgung nicht konstant ist. Die einfache Implementierung, kombiniert mit der Effizienz und Zuverlässigkeit des Systems, macht diese Lösung besonders attraktiv für ein nachhaltiges Wasserressourcenmanagement.
Liste der Komponenten
Widerstände:
R1, R7 = 120 kΩ
R2…R6, R8, R9 = 5.6 kΩ
Kondensatoren:
C1 = 220 μF, 16 VL, electrolytic
C2 = 4.7 μF, 16 VL, electrolytic
C3…C5 = 100 nF, ceramic
Halbleiter:
D1, D2 = LED 5 mm, Blue
D3, D4 = 1N4007
D5 = LED 5 mm, Red
D6 = LED 5 mm, White
Q1 = BC547 transistor
U1, U2 = CD4093
U3 = CD4040
Verschiedenes:
SW1 = Microswitch
SW2 = 4-ways Dip-Switch
RL1 = 12V Relay (Finder 44.62)
Empty1, Full1 = Lever microswitches (1 each)
PS1 = 12V Supply Module HLK-5M12
2× 7+7 pin DIL socket
1× 8+8 pin DIL socket
2× Fuse holder, PCB type
2× 2 Poles screw terminal, pitch 5.08 mm
2× 3 Poles screw terminal, pitch 5.08 mm
PCB S1715 (100×71 mm)
Über den Autor
Leonardo Sammartano, der derzeit im Ruhestand ist, unterrichtet Gymnasiasten in angewandter Elektronik und digitaler Fertigung. Er begann in den 1970er Jahren als Designer in der Abteilung für „Special Instruments“ von Olivetti und arbeitete später bei Marconi und anderen Branchengrößen in diesem Bereich. Später wechselte er in die Nuklearindustrie, im Energiesektor und interessierte sich dann für Risikomanagementsysteme in Produktionsbereichen und Großbaustellen.
Anmerkung der Redaktion: Dieses Projekt erschien ursprünglich in Elettronica IN.
Übersetzung: Juergen Kellner




Diskussion (0 Kommentare)