
Leitungen aufspüren
über
Vor zwei Jahren fing alles an: Im Frühjahr begann das Gras auf meinem Rasen zu wachsen und der Rasenmäher sollte aus seinem Winterschlaf geweckt, leicht überholt, aufgetankt und dann auch bestimmungsgemäß eingesetzt werden. Doch schon im Jahr zuvor drängte sich angesichts des so schön gleichmäßig per Rasenroboter geschnittenen Nachbar-Rasens die Frage auf: Warum selber mähen, wenn das auch automatisch geht? Gedacht, gekauft, aber noch lange nicht erledigt…
Leitungen & Rasen
Wenn man den Riesenkarton mit dem neuen Stück Technik in den Händen hält, kommen Probleme auf einen zu, die man leicht und dafür grob unterschätzt. Bei der Recherche, welcher Apparat sich für meinen U-förmigen Garten (mit mehreren Engstellen unter 1 m Breite) eignet, war ich natürlich auch auf die Eigenheiten dieser potentiellen Mähknechte gestoßen. Ich wusste, dass so ein Mähroboter eigentlich ziemlich „unintelligent“ ist und die Fahrten durchs Gras per Zufallssteuerung unternimmt. Wenn er irgendwo anstößt, fährt er zurück, dreht sich (zufällig) ein Stück und probiert es so lange weiter, bis die vorgegebene tägliche Mähzeit beendet ist (oder aber der Akku zur Neige geht).
Ein ziemlich dummer Roboter also, denn da ist nichts mit Kamera oder innerer kognitiver Landkarte. Um ihn am Verlassen des Grundstücks zu hindern und nicht zu mähende Flächen auszuschließen, muss man rundum ein Begrenzungskabel verlegen. Und damit er seine Ladestation findet, braucht der Roboter eine extra Suchleitung - auf dem Rasen oder besser im Boden. Durch diese Leitungen fließt ein gepulster Strom und dank eingebauter Magnetfeldsensoren weiß der Roboter, wo er ist. Bei meinem Roboter (Bild 1) ist das Signal sogar individuell und per Passwort verschlüsselt, sodass ein gestohlener Robbi ein unbrauchbarer Robbi ist. Das schreckt immerhin Diebe ab, die noch auf drei zählen können. Der einzige zusätzliche Luxus bei meinem Exemplar ist eine Funkanbindung über ein Modem ans Internet. Ich kann also weltweit auf meinem Smartphone nachschauen, was der Roboter gerade macht und ihn etwa bei schwerem Regen in sein Häuschen (Bild 2) schicken.


Vor dem Lohn des Zuschauens beim automatischen Mähen haben die Götter allerdings die Verlegearbeiten gesetzt. Bei mir waren das gut 500 m grüne Litze mit ca. 1,5 mm2 Querschnitt. Wenn man sich die Sache einfach machen will, verlegt man die Leitung auf dem Rasen und tackert sie alle 50 cm mit einer Art Plastik-Hering fest (siehe Bild 3). Mit der Zeit verschwindet die Leitung dann im Filz des Rasens. Sagte der Hersteller. Und generell stimmte das auch. Allerdings ist das nur da praktikabel, wo man seine Füße sehr selten hinsetzt, sonst baut man sich Stolperfallen. Bei Wegen und Rabatten verlegt man die Leitung besser 10…20 cm tief unter Steinen oder (Beton-)Platten. Und/oder man zieht mühsam Kerben mit einem ungebogenen Spaten durch den Rasen und drückt die Leitung in die Erde. Oder aber man holt sich einen Profi mit einer Leitungsverlegemaschine, der diese schweißtreibende Tätigkeit in kurzer Zeit erledigt. Ich hatte mit allen vier Methoden zu tun, denn just nachdem ich fertig war, zeigten sich die Folgen einer fehlerhaften Beschreibung im Handbuch. Da stand, dass man den Abstand des Kabels zu Rändern und Hindernissen zwischen 15 und 50 cm konfigurieren könne. Im Vertrauen darauf habe ich die Leitungen in einem Abstand von 20 cm zur tatsächlichen Grenze verlegt. Beim anschließenden Konfigurieren meines Roboters merkte ich dann, dass der minimale einstellbare Abstand 25 cm beträgt. Mein Fluchen trug allerdings Früchte: Der Hersteller schickte mir netterweise einen Profi mit Verlegemaschine, der die schon von mir im Boden verlegten 250 m Leitung dann nochmals mit 30 cm Abstand versenkte. Alles war gut und der Mäher mähte hervorragend, wie von mir geplant und erhofft.

Kabelbrüche
Mein Glück währte allerdings nicht lange. Wenn man sich so intensiv mit seinem Rasen beschäftigt, dann kümmert man sich auch. In meinem Fall hieß das „Kampf dem Löwenzahn!“. Da ich ja wusste, wo die Kabel liegen, war ich der Einzige mit der Lizenz zum Töten von „Unkraut“. Zunächst klappte das ganz gut. Aber dann, irgendwann, passierte es: Beim Ausstechen eines prächtigen Löwenzahns hatte ich mich die entscheidenden Zentimeter vertan und der Roboter blieb einfach stehen. Ich hatte die Leitung unterbrochen. Kein großes Problem, denn ich wusste ja, wo genau ich in gefährlicher Nähe der Leitung gegärtnert hatte. Nach etwas Graben sah ich die durchtrennten Kabelenden. Wenn etwas Luft ist, steckt man die Enden in eine spezielle, mit Fett gefüllte, wasserdichte Klemme (Bild 4), quetscht die Klemme zu und alles ist wieder in Ordnung.

So ein Malheur ist mir allerdings nicht nur einmal passiert. Im zweiten Jahr des autonomen Rasenmähens wurde ich scheinbar unvorsichtiger, denn ich hatte am Rand des Gartens über etliche Meter verteilt einige Nichtgras-Pflanzen ausgestochen. Bis ich merkte, dass Robbi hilf- und orientierungslos stehengeblieben war. Ausgerechnet an dem Rand, wo die professionelle Verlegemaschine aktiv gewesen war und die Leitung besonders tief und nicht von mir verlegt im Boden lag. Was also tun? Alle potentiellen Stellen nacheinander ausgraben? Oder technische Hilfsmittel einsetzen?
Als Elektroniker tendiere ich nachvollziehbarerweise zu Technik. Also war zunächst Kaffeepause angesagt. Meine Stirn legte sich in angestrengte Nachdenkfalten. Und dann kam Google zum Einsatz.
Trial & Error
Mein erster Gedanke war, alle Kabel von der Ladestation (Bild 5) im umfunktionierten Hundehäuschen abzumachen und sie über einen „Vorwiderstand“ alias Glühlampe direkt mit Netzspannung zu verbinden. Dann sollten an der defekten Stelle Geräusche der Kategorie „spratzel-zisch“ zu hören sein. Wenn denn der Boden feucht genug war. Es stellte sich raus: Er war es nicht! In aufrechter Position war nichts zu hören, egal welches Kabelende ich mit dem Netz verband. Und näher ran im Sinne von Hinknien und das Ohr Richtung Grashalme zu senken, das war mir dann doch etwas zu riskant, denn ein Ohr ist bekanntlich außen am Denkgehäuse festgemacht und Neuronen sind inkompatibel mit 230 V. [Anmerkung der Redaktion: Wir raten dringend davon ab, Netzspannung als Messmittel einzusetzen - solche Versuche können tödlich enden!]

Was dann? Hallsensoren hätte ich gehabt, aber bei einer Unterbrechung fließt kein Strom und wo kein Strom, da kann man auch kein Magnetfeld erfassen. Das ist auch dem Roboter schon aufgefallen ;-).
Google meinte, dass solche Rasenroboter bzw. deren Ladestationen pulsierende Signale in die Leitungen injizieren, deren Oberwellen man mit einem Langwellenradio empfangen könne. UKW sollte nicht gut gehen, da feuchtes Erdreich hohe Frequenzen ganz gut abschirmt. Also Langwelle. Doch woher so eine Antiquität nehmen, wenn nicht stehlen? Bei mir kommt das Radio aus dem Internet bzw. der Netzwerkdose. Aber meine Mutter hatte noch solch ein analoges Kofferradio in der Küche. Also versuchte ich es mit dieser Leihgabe. Hierzu darf man nur immer ein Kabelende an die Ladestation anschließen, denn wenn beide Seiten des durchtrennten Kabels mit diesem Signal gespeist werden, findet man die Bruchstelle nie. So ultrapräzise ist eine Ortung per elektromagnetischer Abstrahlung schließlich nicht. Aber langer Rede kurzer Sinn: Es funktioniert!
Man kann deutlich eine Veränderung im Rauschen/Knistern feststellen, wenn man das Radio in die Nähe der Leitung mit Signal bringt. Man stellt dann die Lautstärke so ein, dass sich das Hörbare schon bei kleinen Abstandsänderungen verändert. Das klappt auch bei 20 cm tief vergrabenen Leitungen. Ich brauchte dann nur drei bis vier Testdurchläufe am Boden, um die Stelle zu finden, wo das Signal abrupt aufhört. Ich war mehr als erleichtert und während des Flickens der schadhaften Stelle schwor ich dankbar, dass ich Google ein Bier ausgebe, wenn ich es mal treffe.
Andere Fälle
Wer gelegentlich damit zu tun hat, Löcher in Wände zu bohren, um per Dübel und Schrauben ein Bild oder ein Regal aufzuhängen, der wird auch bei Beherzigung der Pi-mal-Daumen-Regel, dass eine Leitung unter Putz stets senkrecht oder waagerecht von einer Steckdose oder einem Schalter abgeht, immer ein mulmiges Gefühl haben. Auch wenn in Deutschland diese Regel seit den 1950er Jahren ziemlich gut befolgt wird, so gibt es a) Ausnahmen und b) auch ältere Gebäude mit „freier Verdrahtung“. Hinzu kommt, dass man in Bädern und anderen Nassräumen nicht nur auf die Strominstallation aufpassen muss. Letztlich muss man also wissen, ob irgendetwas Metallisches in der Wand versteckt ist, bevor man den Bohrhammer ansetzt.
Wenn es nur darum geht, ob in der Nähe der geplanten Bohrung ein Kabel oder ein Rohr verlegt ist, dann eignet sich für diesen Zweck sehr gut einer der in jedem Baumarkt erhältlichen „Metalldetektoren“. Diese Geräte entscheiden nach dem Motto „da oder vermutlich nichts da“, ob man das Bohren riskieren kann. Etwas bessere Geräte wie meines (Bild 6) haben verschiedene Betriebsmodi und können angeblich Holz (meiner Erfahrung nach eher schlecht bis gar nicht) bzw. dessen Feuchtigkeit, Metall (egal ob Eisen oder Nichteisen – das klappt halbwegs) sowie elektrische Wechselfelder (klappt auch halbwegs) detektieren. Für die normale Hausinstallation ist so ein Gerät ausreichend und immerhin besser als Nichts.

Neulich allerdings habe ich für Elektor einen „richtigen Metalldetektor“ getestet, den Typ CS-400 von Velleman (Bild 7) [1]. Dabei habe ich herausgefunden, dass sich so ein Gerät ganz besonders gut zum Aufspüren verdeckt verlegter Leitungen oder Rohren aus Metall eignet. Sogar für das präzise Lokalisieren von Holzbalken hinter Rigips-Platten ist so ein Schatzsuchgerät sehr gut geeignet. Selbst preiswerte Varianten richtiger Metalldetektoren sind also deutlich genauer und zuverlässiger als die einfachen Detektoren aus dem Baumarkt – allerdings auch teurer und etwas unhandlicher.

Mit einem Metalldetektor – egal ob super-empfindlich wie der von Velleman oder billig und einfach wie die aus dem Baumarkt - eignen sich durchaus dazu, verstecktes Metall und mehr in Wänden oder in der Erde zu finden. Was damit aber nicht geht, ist Unterbrechungen zu lokalisieren, denn die Trennstellen sind typischerweise so schmal, dass die räumliche Auflösung nicht ausreicht. Also muss hier die Methode mit dem Radio angewendet werden. Doch was, wenn kein HF-Signal oder keines mit schnellen Flanken zur Verfügung steht?
Dann baut man sich einen Generator!
Für alle Fälle
Durch meine Erfahrung mit den Leitungen im Rasen und die vorhergehenden Überlegungen wuchs der Wunsch nach einer Methode, die (fast) immer und überall funktioniert. Also auch in den Fällen, wo ein Rasenroboter keine steilflankigen Signale anbietet, die mit einem Radio erfassbar sind. Oder wo schlicht ein Stromkabel aus anderen Gründen (wie für eine Lampe) durchs Erdreich verläuft und durchaus einmal Bekanntschaft mit einem Spaten oder Motorhacke machen kann. Für alle Fälle, in denen eine Leitungsunterbrechung gefunden werden soll, braucht es also etwas Elektronik, die das erforderliche Signal zur Detektion durch einen passenden Empfänger generiert.
So etwas zu bauen, das ist nicht schwer. Zuvor sollte man sich aber über die Kriterien klar sein. Klar ist, dass höhere Frequenzen durch das Erdreich (oder Mauern) stärker bedämpft werden als niedrigere. Und da es Radios fertig gibt, spart man sich so schon mal den Bau eines Empfängers. Idealerweise sollte man sich also ein Radio mit Langwellenbereich zulegen. Dass in Deutschland wie in einigen anderen europäischen Ländern bald keine rein analogen Radios mehr verkauft werden dürfen, ist unproblematisch, denn der integrierte digitale Empfänger neuerer Radios stört ja nicht. Und außerdem gibt es immer noch eBay. Hier habe ich mir mein „eigenes“ Langwellen-Radio (Bild 8) für kleines Geld besorgt - und das können Sie auch, wenn sie nicht sowieso noch irgendwo so ein Gerät herumstehen haben. Übrigens muss es nicht zwingend ein Radio mit LW-Bereich sein. Mittelwelle geht in der Regel auch noch, sofern die Flanken des zu detektierenden Signals steil genug sind. Einfach ausprobieren…

Signalinjektor
Ein amplitudenmoduliertes Signal zum Empfang mit einem LW-Radio ist schnell gebaut. Man könnte dazu einen handelsüblichen kleinen Mikrocontroller nehmen und ein paar Zeilen Code würden ausreichen. Aber wenn wir es schon mit analoger Technik zu tun haben, dann sollte auch eine Analog-Schaltung zum Zuge kommen. Wie wäre es also mit dem IC aller ICs, dem Timer 555?
Geht prinzipiell. Doch wenn man ein amplitudenmoduliertes Signal will, dann braucht es schon zwei Timer-ICs – einen für die NF und einen für die HF. Sowas gibt es in einem Gehäuse: Der Typ 556 ist ein doppelter 555. Es wäre so schön einfach, aber ein normaler 555 hat wie auch sein dualer Kollege 556 den Nachteil, dass er 5 V zur Stromversorgung benötigt und einiges an Strom zieht. Nicht gut für eine Batterieversorgung. Aber glücklicherweise gibt es den 556 in einer CMOS-Variante. Das IC TLC556 funktioniert schon prima ab 2 V und kann demnach sehr gut durch zwei AA- oder AAA-Zellen oder eine Lithium-Knopfzelle des Typs CR3032 versorgt werden.
Aus diesem Grund wurde dieser IC-Typ für die Schaltung des universellen Signalinjektors in Bild 9 verwendet. Mit R1 und C2 generiert Timer 1 (IC1A) ein symmetrisches Rechtecksignal von 465 Hz, also einen Halbton über dem Kammerton a. Damit wird über den Reset-Eingang von IC2A ein mit 465 Hz amplitudenmoduliertes und durch R2 und C4 bestimmtes 185-kHz-Rechtecksignal erzeugt. Mit P1 kann man die Amplitude des in die Leitung eingespeisten Signals so einstellen, dass dieses gerade noch gut im Radio zu empfangen ist. R3 dient lediglich als Kurzschlussschutz.
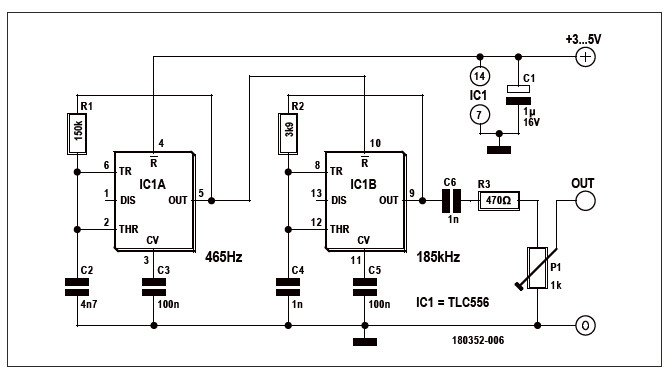
Bei den Bauteilewerten ist man nicht genau festgelegt. Die dritte oder fünfte Oberwelle von Timer 2 sollte noch genug Amplitude besitzen, um sie aus der Nähe mit einem Mittelwellenempfänger empfangen zu können. Wer das Pech hat, in der Nähe starker Sender im Bereich von 185 kHz zu wohnen, der kann natürlich mit R2 leicht andere Frequenzen realisieren. Dabei gilt f = 0,725 / (R2 x C4).
Wollen Sie weitere Elektor-Artikel lesen? Jetzt Elektor-Mitglied werden und nichts verpassen!
Diskussion (6 Kommentare)